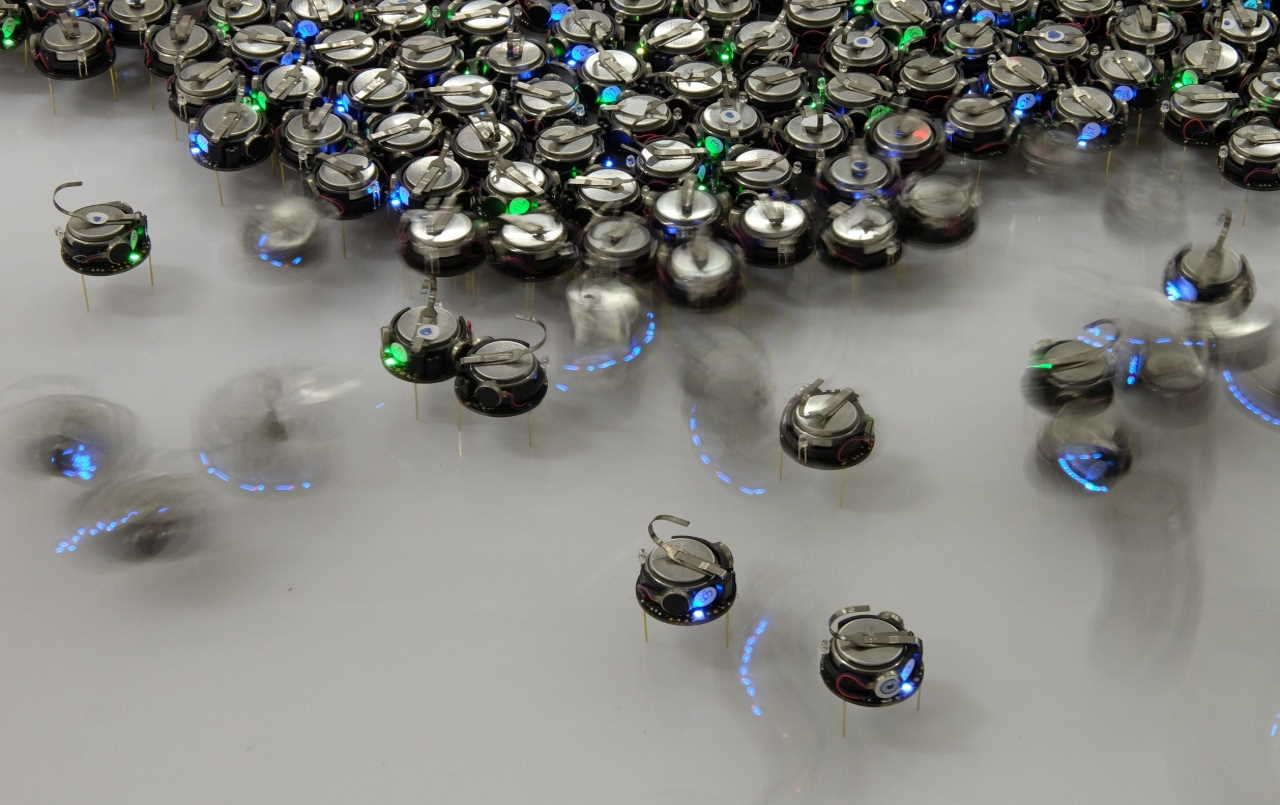
Британські інженери дійшли дивного висновку, досліджуючи поведінку рою маленьких роботів — їм краще вдається адаптуватися до змін, якщо позбавити їх можливості багато спілкуватися між собою. Цей результат суперечить широко поширеній думці, що більша кількість каналів зв'язку завжди покращує обмін інформацією в мережі. Поведінку рою з 50 учасників, яким заборонили багато спілкуватися, дослідники описали у Science Robotics.
Jerry Wright
Як організувати роботів у рій?
Однією з головних місій маленьких простих роботів без особливих додаткових функцій, яких об'єднують разом, є моніторинг середовищ, які для окремих є надто складними чи небезпечними. Прості у конструкції вони можуть разом швидко обстежити великий масив території, як-то дно океану або навіть внутрішні кровоносні судини, та при цьому не вимагають значних витрат. Втім, їх для роботи потрібно якось організовувати. Так одним зі значних напрямків досліджень є розробка способу керування децентралізованими роями, де у роботів немає керованого «лідера». Так інженерам потрібно розв'язати проблему «best-of-n», яка вимагає, щоб рій роботів прийняв колективне рішення про те, який варіант з n доступних варіантів пропонує кращу альтернативу для задоволення потреб рою. Кожен варіант характеризується якістю і вартістю, які залежать від одного або декількох атрибутів всього середовища.
Так, наприклад, при пошуку нового місця для гнізда бджоли інстинктивно обирають його зокрема за висотою від землі. Звісно, що пошуки обмежуються певною відстанню від гнізда, де бджоли на той момент мешкають, тож висота від землі місця-кандидата є якістю варіанту, а відстань до нього — кількістю. Інженери експериментували з роботизованими роями у системах, де таких варіантів було більше двох, а роботи заздалегідь знали або якість, або кількість варіанта та погоджувалися з варіантом з найбільшим значенням якості. Однак, пропоновані рішення зазвичай вимагали роботів з вищими вимогами, як-то комунікаційні можливості, обчислювальна потужність та пам'ять. Також застосування таких алгоритмів у реальних умовах обмежує необхідність попередньо показати роботам місця розташування альтернатив. А крім колективного вибору кращої альтернативи, децентралізований процес прийняття рішень повинен обов'язково має включати етап децентралізованого виявлення доступних альтернатив. Тож у своїй роботі вчені вивчали можливість рою з 50 роботів діяти у змінному середовищі та розвивати як механізми виявлення змін, так і поширення інформації між собою.
Як роботи приймають рішення?
Щоб не стояти на місці, роботи об'єднують інформацію, яку вони отримують від інших членів рою, і таким чином координують свій рух. Поведінка роботів у дослідженні була заснована на класичній моделі виборця (voter model), де на кожного окремого робота ітеративно впливає один випадковий сусід. Так «конфлікт» інформації між роботами, що спілкуються, змушує їх переглядати свою власну думку. І замість того, щоб шукати визначене місце за власними спостереженнями, вони можуть через соціальні взаємодії з іншими робити це швидше. У роботі вчені запускали роботів «з мінімальними пам'яттю, сенсорними і комунікативними можливостями», які могли переміщуватися та оцінювати своє приблизне положення. Причому кожен робот може запам'ятовувати тільки місце розташування і якість побаченої ним локації, найкращі дані з яких транслював у формі відстані до неї іншим.
Для роботизованих роїв точні моделі необхідні, але, як правило, їх важко отримати.Щоб точно контролювати поведінку рою і прогнозувати його динаміку в різних сценаріях, вчені моделювали її звичайних диференціальних рівнянь, кожне з яких описувало як субпопуляції (групи роботів з однаковою думкою) змінюються з плином часу в залежності від характеристик навколишнього середовища і можливостей роботів. Увагу вони зосередили на здатності рою колективно обирати кращу ділянку і адаптуватися до змін навколишнього середовища: коли з'явиться кращий варіант, зникне або змінить свою якість. Після будь-якої з цих змін, рій мав приходити до консенсусу на користь кращого варіанту, коли більшість учасників (кворум 80 відсотків) дотримується тієї ж думки.
Як рій побігав у інженерів?
Щоб дати рою адаптуватися, вчені ввели два альтернативних правила, що дають окремим роботам змогу переглядати свою думку при появі нових даних про навколишнє середовище: можливість порівнювати і повторювати вибірку. З ними моделювання виявило досить суперечливу тенденцію: зменшуючи дальність зв'язку, рій може краще адаптуватися до мінливих умов. Так менша кількість каналів зв'язку на одного робота призводить до більш ефективного розповсюдження інформації всередині, що суперечить широко поширеній думці про те, що більш взаємопов'язані мережі більш ефективно обмінюються інформацією. Однак водночас узгоджується з ефектом «чим повільніше, тим швидше» серед роботів, коли система працює гірше, коли її компоненти намагаються стати кращими. Таким чином, помірна індивідуальна ефективність фактично призводить до кращої системної продуктивності. Так швидкість поширення інформації і стала тою помірною ефективністю, яка призвела до вищої продуктивності рою у виборі необхідної локації.
Mohamed S. Talamali et al. / Science Robotics, 2021
Чому відсутність зв'язку полегшила вибір?
Коли роботи могли зв'язуватися з будь-яким іншим роботом, рій не міг адаптувати своє рішення до кращих варіантів, які були. Тільки-но рій досягав консенсусу на користь однієї альтернативи, роботи, які знаходили нові кращі варіанти, становили меншість у порівнянні з іншою частиною рою. У такому випадку меншість стикалася з величезною більшістю і не могла підказати кращу локацію. Однак, якщо обмежити спілкування, меншість з кращою думкою може поступово завоювати популярність в популяції і врешті направити рій до правильного вибору. Конкуренція виникає через те, що роботи вибирають повідомлення відповідно до моделі виборця, де робот з m сусідами обере (і обробить інформацію) одне повідомлення з m отриманих (за умови, що всі m сусідів відправили своє повідомлення). Як наслідок, кожен сусід (виборець) робота-одержувача має ймовірність 1 / m, що його повідомлення буде прочитано. Таким чином, очевидно, що збільшення числа сусідів кожного робота послабить вплив кожного виборця. Це і дає змогу рою роботів успішно адаптуватися до змін навколишнього середовища, які можуть бути появою або зникненням об'єкта, чи зміною його якості. Вимоги з точки зору індивідуальних можливостей робота мінімальні, що робить можливою реалізацію навіть в більш простих роботах, ніж ті, які використовувалися в експериментах, на кшталт одноразових або органічних нанороботів. При цьому, не зважаючи на індивідуальну простоту, рій здатний виявляти більшу чутливість та краще шукати потрібну локацію.
Рої роботів все частіше трапляють серед розробок інженерів, де вони досліджують складну колективну поведінку та способи нею керувати. Так, наприклад, ми вже писали про рій маленьких «бездумних» роботів, який у зв'язці прибрав з тренувальної арени сміття та відчинив двері. Або про автономний рій маленьких дронів, який зміг винюхати джерело витоку газу. Координують роботів також різними способами — від світлодіодів до магнітного поля та ультразвуку.




