Інженери навчили пів сотні 40-грамових дронів кооперуватися та разом шукати джерело витоку газу. Так у кімнаті 10 на 10 метрів вони знайшли банку зі спиртом, пари з якої дослідники доти розпилили довкола. Газ виявляє один із дронів, а потім повідомляє про це іншим, щоб всі разом відправилися на пошуки першоджерела. Результати експерименту представили на конференції IEEE/RSJ International Conference on Intelligent Robots and Systems, а стаття доступна на сервісі препринтів arXiv.
Bardienus P. Duisterhof et al.
Навіщо дрони шукали спирт?
Пошук способів об'єднати безліч мікролітальних апаратів та змусити їх діяти спільно — роїтися — займає інженерів не лише кооперацією, а і можливістю полегшити пожежно-рятувальні роботи, дослідницькі місії або просто використовувати групки дронів для роботи на складах або стеження за виробничими процесами. Наприклад, зараз рятувальникам, коли відбувається витік газу у великій будівлі або на промисловому майданчику, доводиться самостійно шукати джерело витоку за допомогою газовимірювальних приладів. Це займає чимало часу, а рятувальники при цьому ризикують своїм життям.
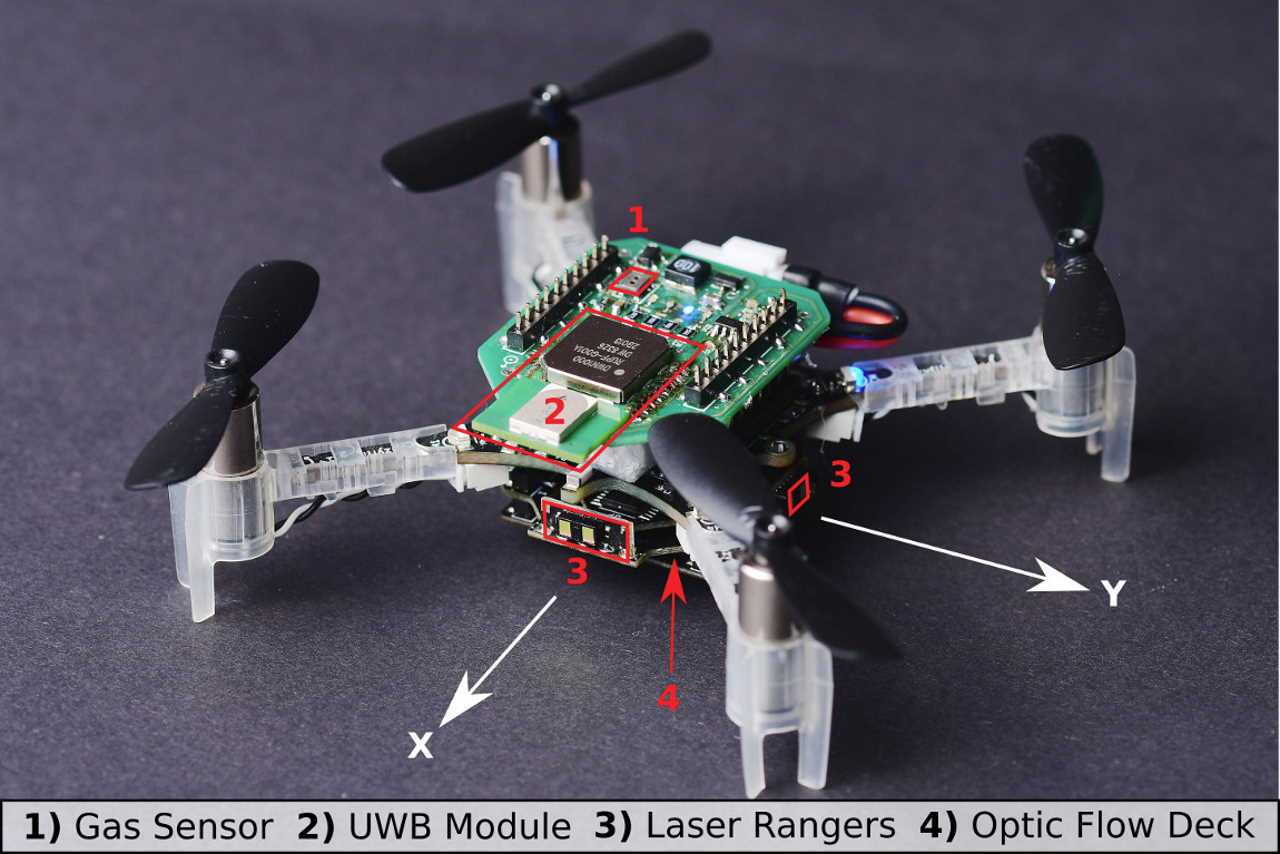
Тому крихітні дрони — ідеальні кандидати, щоб замінити людей на небезпечній роботі: вони достатньо малі, щоб переміщатися складним простором, автономні, безпечні для оточуючих, маневрені і досить дешеві. Але пошук джерела витоку газу є нетривіальним завданням. Запах може поширюватися по-різному у різних середовищах, а якщо вони ще й ускладнюються перешкодами як-то стінами чи протягом, то скупчення газу можуть утворюватися набагато далі від самого джерела. Крім того, доступні хімічні сенсори для роботів зазвичай менш чутливі та не можуть оперативно реагувати на швидкі зміни концентрації.
Як їх змусили літати роєм?
Головним завданням було якимсь чином об'єднати пів сотні 40-грамових дронів так, щоб їм вистачило обчислювальних можливостей. Для роботи у рої дронам потрібно знати про існування один про одного, щоб уникати зіткнень і співпрацювати. З точки зору програмного забезпечення, дійсно складно розробити алгоритм, здатний виконувати автономну і спільну навігацію за жорстких обмежень ресурсів. Наприклад, популярний підхід одночасної локалізації і картографування (SLAM) вимагає занадто багато пам'яті і обчислювальної потужності. Тому у своїй роботі розробники звернулися до алгоритмів помилок, які дають змогу рою крихітних літаючих роботів автономно досліджувати невідоме середовище і згодом повертатися до вихідної точки.
Замість того, щоб будувати карту навколишнього середовища, як SLAM, керівний принцип тут полягає у можливості дронів рухатися в різних напрямках від пункту відправлення і потім повертатися назад до «маяка». Також у своїй роботі вчені застосували так званий еволюційний алгоритм. Він імітує виживання найбільш пристосованих, а «пристосованість» тут визначається як здатність максимально ефективно локалізувати джерело газу. Так випадкові контролери з рою оцінюються, проходять моделювання кілька «поколінь» (тут їх пройшло 400) та потрапляють у рій, щоб стати там головними. Також до дронів застосували метод рою частинок, з яким їм не потрібно шукати градієнт концентрації газу або напрямку вітру, а лише знаходити місця з більшою або меншою концентрацією речовини.
Моделювання роботи системи, де агенти взаємодіють методом рою частинок і шукають джерело витоку речовини у випадково згенерованому середовищі. MAVLab TU Delft / YouTube
Як пройшло випробування?
Спершу дрони розосередилися кімнатою з перешкодами 10 на 10 метрів, при цьому уникаючи і їх, і один одного. Рано чи пізно один з дронів знаходив коло себе газ та повідомляв про це іншим. З цього моменту вони починали співпрацювати один з одним, щоб якомога швидше знайти джерело газу. За допомогою методу рою частинок, де кожний дрон є «частинкою», вони повідомляють один одному, наскільки багато речовини є поруч із ними, та за цим планують свій рух — йдуть до дрона із найбільшим значенням концентрації. Доти кожний з них рухався залежно від його власних передбачень про концентрацію, положення інших та інерцію в його поточному напрямку руху. Таким чином рій знайшов джерело витоку газу (тут це була банка з рідким спиртом) у межах двох метрів від себе в 11 з 12 прольотів.
Оскільки при роботі з максимальною злітною масою 40 грамів, кількість доступних для вибору датчиків і виконавчих механізмів обмежена, інженери планують знайти економний і доступний спосіб навчити дронів рухатися в умовах низької освітленості або диму, а також підвищити їхнє «чуття» на джерела поширення речовин.
Інженери часто звертаються до «дружніх почуттів» роботів та розроблюють алгоритми, спрямовані на співпрацю. Наприклад, очевидно, що два дрони разом краще справляться із вантажем, аніж один. Або намалюють картину значно швидше, якщо рухатимуться роєм. Причому способів привчити роботів до співпраці не так мало: від виявлення світлодіодів у сусідніх роборибок до магнітного поля та ультразвуку, які просунули рій мікророботів кровоносними судинами.





