Американські дослідники знайшли ідеальну задачу, яка змусить двох незалежних самостійних роботів знайти ключ до співпраці — їм поручили перенести великий вантаж через вузький дверний отвір, уникаючи при цьому перешкод. Кожен робот керується незалежно, знаючи про свою ціль і своє положення у змодельованому середовищі. Однак алгоритми нечіткої логіки привели обох до висновку, що найбільш оптимальним способом виконати завдання — виконати його разом. Спосіб навчити роботів кооперуватися, не створюючи собі «лідера», вчені описали у Intelligent Service Robotics.
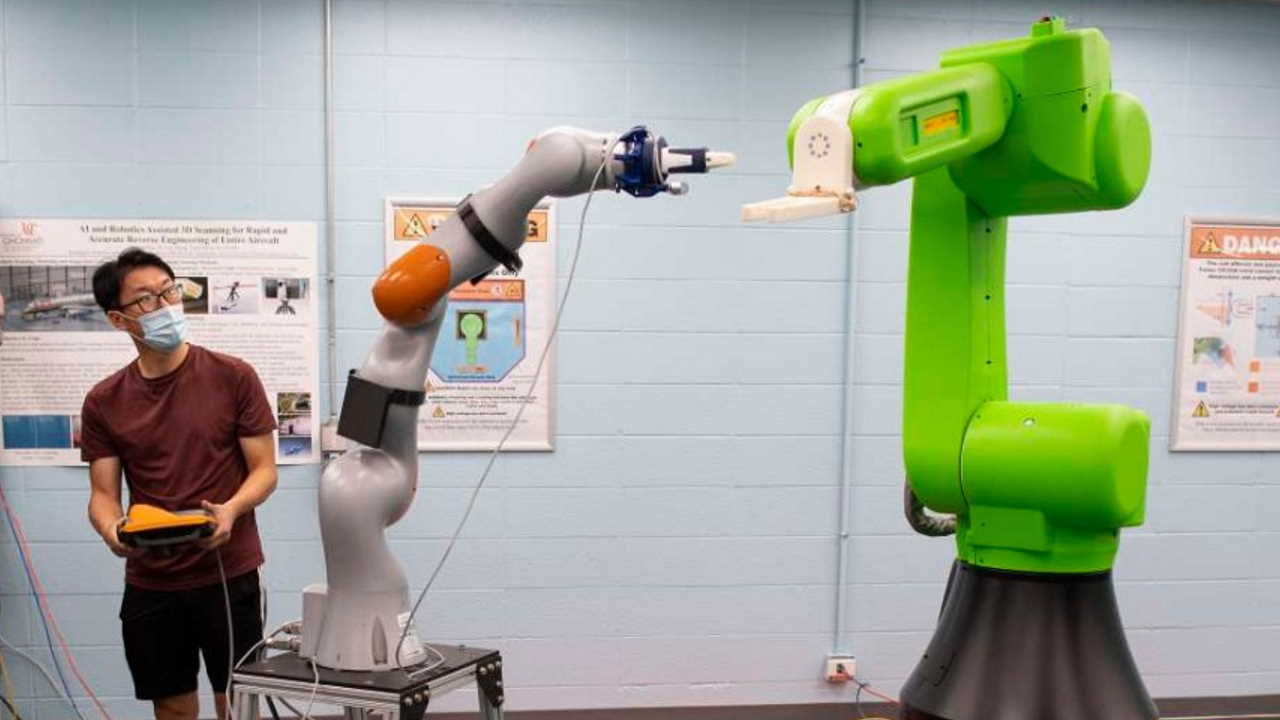
Colleen Kelley / UC
Як подружити роботів?
Звісно, що один робот — це добре, а два — ще краще. Алгоритми, які навчать роботів працювати як з людьми, так і з іншими роботами, значно розширять коло завдань, які можна автоматизувати. Однак, відповідь на це питання не така очевидна — загалом ми могли б навчити одних роботів виконувати певний набір завдань, так само навчити чомусь інших, а разом вони б у результаті виконували якусь корисну дію. Бо співпраця є не надто простим завданням не лише для робототехніки і навчитися знаходити підходи та оптимізувати спільні дії досить складно. То ж чому вчені все більше вдаються до концепції кооперативної або колабораційної робототехніки? Це важливо для гнучких виробничих процесів, де необхідні різні типи співпраці між різними групами.
І тут вже виявляється легше наштовхувати роботів до розв'язування різних задач та, наприклад, переходити від транспортування до складання, що іноді також легше робити разом.
Головним способом примусити робота до дії, а зокрема взаємодії, є нейромережі, які за попереднім навчанням допомагають йому орієнтуватися у просторі, враховуючи свої технічні особливості. Методи обчислювального інтелекту (computational intelligence), такі як штучні нейронні мережі, нечітка логіка та генетичні алгоритми (ГА) дають змогу знайти рішення складних практичних завдань. У цій роботі інженери Цинциннатського університету досліджували децентралізоване керування, яким могли б послуговуватися роботи для прийняття рішень. Вони звернулися до алгоритмів нечіткої логіки (fuzzy logic) — комбінації підходу з нейромережами, яка імітує людські міркування, замінюючи просту двійкову класифікацію «так або ні» нечіткою класифікацією типу «якщо - то», яка вказує на ступінь правильності чи неправильності дії. Така нечітка нейромережа пропонує роботу динамічну еволюцію компонентів його управлінської моделі (нейронів, правил), щоб справлятися зі зміною умов середовища або завдань. Подібні генетичні алгоритми використовують випадкові процеси і еволюційний відбір для отримання найбільш успішних результатів. Алгоритм зазвичай виконується доти, поки не досягнеться бажана продуктивність чи не будуть помітні суттєві зміни у розв'язанні задач. Його інженери обрали через ефективність та простоту порівняно з іншими алгоритмами оптимізації, такими як нейроеволюція.
Colleen Kelley / UC
Чого навчали роботів?
Попередні дослідження способів змусити роботів переносити щось разом зосереджувалися на парадигмі лідер-послідовник, де лідер приймає рішення щодо планування шляху для команди роботів, а вони просто за ним слідують. Тут же, як ми зазначили, вчених цікавило децентралізоване керування, де кожен у команді роботів незалежний і визначає свої власні дії навіть не маючи уявлення про можливість кооперації. Це набагато складніше завдання, адже роботи можуть своїми діями суперечити один одному. Однак, цей підхід модульний і масштабований, тому метою цієї роботи стало проілюструвати ефективність у ньому нечітких нейромереж, з якими роботи зможуть виходити за рамки того, чого вони були навчені. Вони об'єднують поведінку по уникненню перешкод і прагнення до досягнення мети в одну систему, що не потребує додаткового керування зовні.
Дослідники погоджуються, що зв'язок між роботами міг би підвищити їхню продуктивність, але вони «зацікавлені у вивченні більш загального випадку», коли роботи можуть втратити зв'язок між собою, а з цим і здатність до виконання завдань. Змодельоване для двох роботів середовище — кімната із дверним отвором та перешкодами, крізь які вони мали пронести вантаж. Успішно виконаним завдання буде вважатися, якщо роботи оберуть найкоротший шлях, уникаючи при цьому контакту з перешкодами. Вчені ввели вимогу про співпрацю, але вона виключає зв'язок між двома роботами: вони не знають, як кожен може на якусь зміну відреагувати. Єдина інформація, доступна роботу, — це його власне положення у навколишньому середовищі (кімнаті), орієнтація вантажу і розташування отвору. Так, на думку дослідників, роботи зможуть підлаштуватися під будь-які умови.
Як попрацювали роботи?
Спільне перенесення якогось вантажу вимагає координації — реакції на те, що робить ваш помічник. Тому звісно, що це стало ідеальною задачею для вивчення співпраці між роботами. У симуляції роботи успішно виконували завдання в 95 відсотках випадків, але що більш важливо — потрапивши у нове середовище з двома новими незнайомими перешкодами, роботи у партнерстві справилися у 93 відсотках випробувань. Це свідчить про ефективність методу, адже роботам не довелося перенавчатися, щоб підлаштуватися під нові параметри. Більшість невдач у завдяннях відбувалися через те, що роботи зупинялися і припиняли корисні дії, що підкреслює одну з основних проблем використання незалежно керованих агентів, коли кожен робот видає суперечливі команди. Кожен починає рухатися у своєму, за власною думкою, найкращому напрямку, а тому завдання провалюється. Цікаво, що вони іноді можуть знайти вихід з цього стану через помилки датчика. Вчені підкреслюють, що якби вони дозволили зв'язок між роботами, вони могли б встановити відносини лідер-послідовник і, ймовірно, подолати перешкоду. Втім, майбутні роботи передбачають вміння роботів самостійно розпізнавати стан, коли вони застрягли.
Також продовження проєкту інженери передбачають в ускладненнях завдання та порівнняні результатів із альтернативними методами контролю — наприклад, навчання з підкріпленням. Також вони звісно планують протестувати підхід із реальними роботами, для яких створять механізм або важіль, щоб утримувати вантаж та вміти здійснювати коригувальні рухи, як це роблять люди для підтримки. Але поки їхні роботи переносять змодельований вантаж, дрони Технологічного інституту Джорджії вже підняли п’ятикілограмову коробку вчотирьох, хоча і через централізовану систему управління. А особливості комунікації досліджуються з роями роботів. Вони можуть, наприклад, винюхувати джерела витоку газу, знаходити собі лідера за світлодіодом та долати разом перешкоди на арені.





