Корейські матеріалознавці розробили м'який маніпулятор, який може хапати предмети мікрометрового масштабу і одночасно заміряти температуру і свій тиск на них. Так полімерна рука підняла кілька металевих шайб, відкрутила кришечку з пляшки і температурно простимулювала вилуплення равликів, яким потім виміряла серцебиття. Свою розробку вчені пропонують використовувати для роботи з живими тканинами під час медичних втручань — їм навіть вдалося виміряти кров'яний тиск на артерії свині. Стаття доступна у Science Robotics.
Рука відстежує равлика у яйці. Yeonwook Roh et al. / Science Robotics, 2021
Навіщо вчені маніпулювали равликами?
М'яка робототехніка, як одне з нових перспективних напрямів, досить швидко захопила увагу інженерів. Вся справа в тому, що вона не вимагає жорстких корпусів і узгодження рухів з ними. З цієї ж причини і не вимагає складних механізмів руху та з цієї ж причини пропонує неймовірну гнучкість і піддатливість. Це дає змогу працювати у найрізноманітніших середовищах — до підкорення дна Маріанської западини. Також це дозволяє інженерам не обмежуватися у функціях. Тому саме м'яка робототехніка бачиться кращим рішенням, наприклад, для нейропротезів, які стануть дешевими і легшими. Будова також дає змогу імітувати шкірне сприйняття, подібне сенсорним рецепторам в пальцях людини, інтегруючи сенсори, що реагують на, наприклад, на тиск, напругу і температуру. Крім того, м'які захоплення забезпечують делікатне поводження з живими тканинами неруйнівним чином.
Так концепція м'якої робототехніки дала змогу підхопити тонкі шари вирощеної в лабораторії тканини. У своїй новій роботі дослідники з Кореї вирішили знайти подібний «розумний» матеріал, який зможе безпечно взаємодіяти і з живим організмом (у даному випадку яйцями равликів) і витримувати високі навантаження.
Yeonwook Roh et al. / Science Robotics, 2021
Що вони зробили?
Пристроям на таких м'яких платформах, як і раніше, не вистачає можливості точно взаємодіяти з м'якими об'єктами складної форми у мікромасштабах. Тобто одних лише м'яких механічних властивостей недостатньо, і необхідно шукати підходи як для маніпуляції, так і розпізнавання об'єктів. Звідси і ще одна складність, з якою стикається м'яка робототехніка — обмежена щільність сили, вантажопідйомність, через властиву матеріалу м'якість. І діапазон контрольованої жорсткості, яка реалізується за допомогою цих матеріалів, дуже вузький — максимальне продемонстроване відношення корисного навантаження до маси склало всього 17.
Маніпулятор згинає пальці під впливом температури. Yeonwook Roh et al. / Science Robotics, 2021
Вчені пропонують використовувати додаткові матеріали, які реагують на стимули і можуть збільшувати силові можливості полімерів. Наприклад, додавання сплавів з пам'яттю форми, пневматичних систем або жорстких вкраплень. Часто це матеріали, здатні реагувати на певні стимули. Втім, більшість з них несумісні з живими тканинами. Наприклад, полімерний папір зі змінною жорсткістю вимагає нагрівання до 90 градусів для спрацьовування.
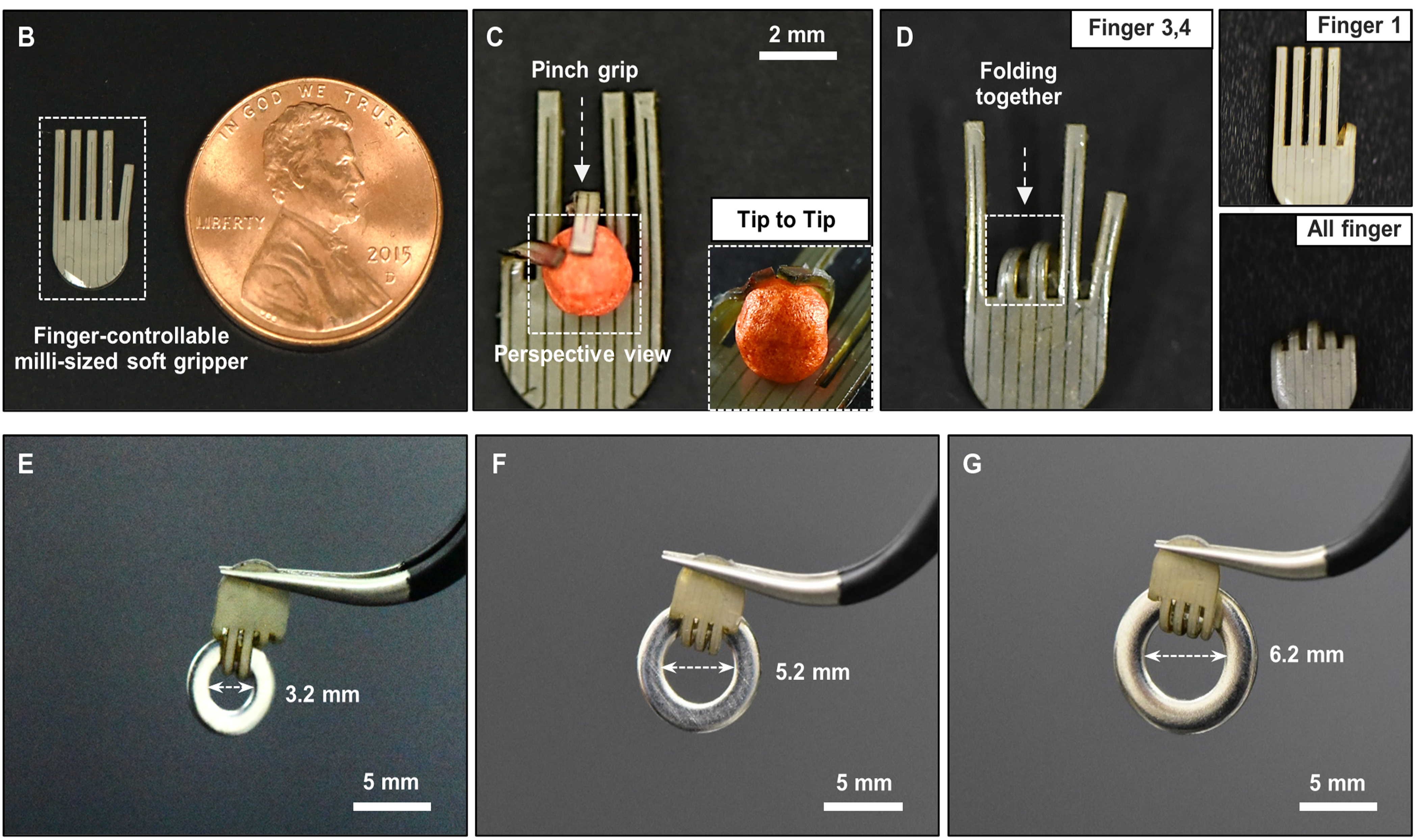
Цього разу вчені створили мініатюрну м'яку роборуку вагою у 25 міліграмів з п'ятьма пальцями по 6,3 міліметра у довжину та 780 мікрометрів у товщину, з вбудованими срібними нанодротами. Це доповнення дає змогу механічно управляти кожним пальцем, а також дає змогу контролювати температуру і навіть застосовувати термостимуляцію. Високу чутливість і можливість реагувати на взаємодію забезпечує додатковий датчик деформації. Так створений маніпулятор може не лише делікатно і без пошкодження вправлятися з крихкотілими речами, а і додавати силу до одного ньютона, забезпечуючи відношення корисного навантаження до маси до 6400.
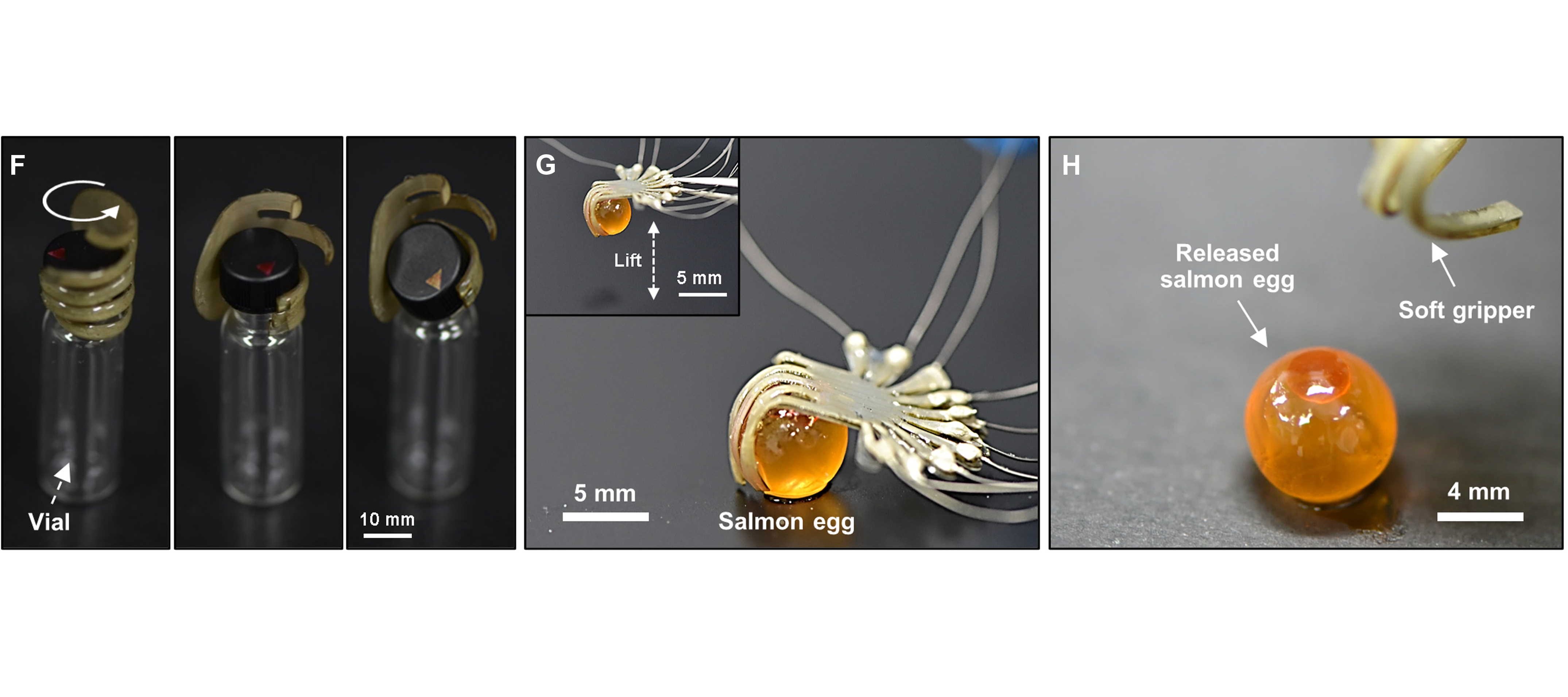
Створений маніпулятор може відкрутити кришку на пляшці та побавитися з ікрою лосося. Yeonwook Roh et al. / Science Robotics, 2021
Як рука допомогла народитися равликам?
Для досягнення основних механічних та інтерактивних властивостей, інженери використовували полімер з пам'яттю форми, який забезпечує змінну жорсткість, оптичний клей, який викликає рух пальців, а також нагрівач, який використовує нанодроти як для вимірювання температури об'єкта при дотику, так і для теплового спрацьовування, що викликає рух. У результаті нагрівання всього до 35 градусів згинає пальці долоні і дозволяє роботу вхопитися за металеві шайби діаметром від трьох до шести міліметрів, загинаючи різні пальці. Підвищення температури додатково знижує жорсткість з 200 до 2 мегапаскалей і прискорює рух пальців. Втім, жорсткості вистачило і щоб відкрутити кришку у пляшки. Випробування вантажопідйомності показують, що рука здатна маніпулювати об'єктами, які у 1200 разів важчі — до 30 грамів. Причому підняти сім грамів під силу всього одному пальцю.
Але, звичайно, ключова характеристика — робота при температурі, безпечній для живих організмів. Так руці вдалося захопити яйце Ахатини гігантської, температурно його простимулювати, щоб викликати процес вилуплення, і проконтролювати частоту серцевих скорочень новонародженого равлика. Важливо відзначити, що яйця равликів мають невелику міцність і діаметр всього у три міліметри, що ускладнює тримання їх навіть пінцетом. Маніпулятор передавав теплову енергію і підтримував температуру яйця близько 30 градусів Цельсія протягом шести годин, а також відчував сигнали вилуплення з допомогою тензодатчика, не зважаючи на відносно невелику масу яйця. Після вилуплення, вчені за допомогою маніпулятора вимірювали равлику серцебиття кожні 0,9 секунди.
Вчені також змоделювали артеріальну систему людини, щоб перевірити можливість використання такого м'якого захоплення для відстеження пульсу у кровоносній судині. Так за допомогою датчика деформації вдалося виміряти пульсову хвилю сонної артерії і артеріального тиску свині. В in vivo експериментах м'який маніпулятор міцно закріпився на артерії для вимірювання кров'яного тиску, але при цьому сам йому ніяк не зашкодив.
Також раніше ми розповідали, як інженери надихнулися морськими огірками та змогли загоїти поранення і вхопити м'яку кульку за допомогою гідрогелевого м'якого маніпулятора, який реагує на воду. А cхожий на хобот слона м'який робот скрутився у спіраль підняв молоток та витягнув ручку з трубки.





