Корейські інженери надихнулися морськими огірками та їхнім вмінням змінювати розміри та жорсткість при взаємодії з водою, і створили м'який актуатор, який став основою маніпулятора для хапання предметів, пов'язки на поранення та робота, який поплавав у воді. Матеріал з гідрогелю здатний реагувати на воду і використовувати її як джерело енергії, а тому з нього можна створювати м'які маніпулятори, що зможуть змінювати свою м'якість на жорсткість та навпаки. Розробку так і назвали за іменем морських огірків, а сама вона потрапила на обкладинку журналу Journal of Materials Chemistry A.

POSTECH
Чим займалися інженери?
Розвиток м'якої робототехніки, що спеціалізується на конструюванні роботів з м'яких матеріалів, подібно тканинам живих організмів, обумовлений її здатністю подолати ряд недоліків традиційних жорстких роботів у широкому спектрі додатків від маніпуляцій до інтерфейсу людина-робот. До прикладу, жорсткому роботу з його навантаженням з електроніки, компонентів оболонки та складних рухових механізмів було б складно досягти глибини Маріанської западини. А от м'якому роботу з плавниками, який до тиску не надто чутливий, це якраз під силу. Або нейропротез на основі м'яких матеріалів виявився значно дешевшим і легшим, хоча при цьому не втратив жодних функціональних переваг. М'які роботи гнучкі, легко деформовані та при цьому достатньо міцні, щоб їх не зупиняли різні не надто приємні середовища з купою перешкод, а нам не було неприємно з ними стикатися. Втім, до слова про складні рухові механізми у традиційній робототехніці, варто додати, що у м'яких роботів із приведенням у рух все ж є обмеження. Так, аби залишити їм стійкість до зовнішніх впливів, рух варто забезпечувати м'якими приводами. І таких існує досить широкий спектр: м'які актуатори приводяться у дію водою, електрикою, теплом, повітрям, магнетизмом і хімічними реакціями. Наприклад, схожий на черепаху м'який робот пройшовся пляжем взагалі без електроніки — лише за допомогою повітря. За таким самим принципом — гнучким клапанам і тиску — м'яка роборука пройшла перший рівень відеогри Super Mario Bros. за 90 секунд, але керуючись водою.
Водяний привод також може працювати не через створення тиску, а через набухання матеріалу, з якого створили робота. Щось подібне відбувається у целюлозі, білкових структурах та синтетичних полімерах, які воду не відштовхують, а реагують з нею. Такі механізми можуть запропонувати ряд переваг, як-то висока деформованість, щільність енергії і ефективність, у порівнянні зі звичайними виконавчими механізмами, що приводяться в дію іншими стимулами. Але впровадження такого методу у робототехніку інженерів поки зупиняє, з огляду на повільність цього процесу. У своїй роботі дослідники Ендрю Чу (Andrew Choi), Хіенсіок Хан (Hyeonseok Han) та Дон Сун Кім (Dong Sung Kim) з Пхоханського університету науки і технологій, що у Кореї, вирішили знайти спосіб створити швидкий, керований водою, самоврядний м'який актуатор, який міг би стати основою для м'яких роботів, що працюють з водою.
До чого тут морські огірки?
Зазвичай механічні зміни властивостей тканин відбуваються дуже повільно — наприклад, старіння, зростання або регенерація. Однак, у морських огірків, дякувати еволюції, розвинувся незвичайний механізм — мутабельна колагенова тканина (mutable collagenous tissue), яка може змінювати свої механічні властивості за кілька секунд або хвилин через нервові імпульси, а не м'язово. Вона допомагає голкошкірим захищатися від нападу хижаків, в один момент перетворюючи їх на твердий предмет. Морські огірки також можуть стискатися або розтягуватися до декількох метрів, а їхня первісна форма відновиться і після смерті, бо у цьому бере участь водопоглинання. Різка зміна колагену у складі тканин може змінити тварині модуль пружності з 50 мегапаскалів до п'яти протягом декількох секунд, а перемикання відбувається з вивільненням хімічного регулятора, що забезпечує утворення водневого зв'язку. І саме цю особливість можна легко пристосувати до м'яких виконавчих механізмів на основі гідрогелю, які поки залишаються механічно слабкими або повільними.
Натхнені цим унікальним механізмом тканин морських огірків вчені озброїлися даними про них, а зокрема про далекосхідного трепанга Apostichopus japonicus, та розробили програмований водний автономний м'який актуатор SITuator - Sea cucumber Inspired, water-driven self-operating soft acTuator. Ґрунтуючись на ефектах пам'яті форми, матеріал з температурозалежного полімеру поліізопропілакриламіду (PNIPAAm) може деформуватися під водою у тимчасову форму з його постійної внаслідок утворення водневих зв'язків між водою і амідними групами PNIPAAm. Через процеси гідратації або дегідратації утворені зв'язки зміщуються, змінюючи форму, а сам процес є повторним і продовжує відбуватися за кількох циклів намочування-висихання. Кожна поручена матеріалу операція вимагала різкої зміни жорсткості, але SITuator для цього потрібна мінімальна кількість води та всього кілька секунд. В результаті простого налаштування форм вченим вдалося змусити його виконані такі складні завдання як захоплення, що вимагає швидких і узгоджених сил спрацьовування, плавання, що потребує швидких послідовних сил спрацьовування, і перекриття поранення, для якого необхідна значна сила взаємодії з поверхнею.
Що може такий матеріал?
Загалом матеріал за незначної зміни обсягу (він поглинає всього два відсотки води від своєї маси) здатний менш ніж за хвилину пом'якшитися з 20 мегапаскалів дло 70 кілопаскалів. При цьому сам цикл приведення в дію має типову функцію пам'яті форми, властиву гідрогелям, і може формувати зусилля у один ньютон, будучи у розмірі всього три міліметри. Спершу зі свого матеріалу вчені вирішили вирізати букви POSTECH (назва університету), щоб продемонструвати можливість формувати його лазерною різкою, та скрутили гідрогель у м'ячик. Втім, варто було додати води, як букви розгорнулися. Так само відбулося і з надрукованою на 3D-принтері руці, яка показала жест «окей» і розгорнулася у звичну долоню. Але вчені шукали більшого функціонала, тож створили із SITuator робота-маніпулятора, якому поручили підняти м'ячик з тендітного гідрогелю. Трипалий маніпулятор справився у воді із завданням завдяки можливості змінювати форму, та підняв з посудини двограмовий предмет за півтори секунди без пошкоджень.
Робота маніпулятора порівняно з іншими. Так той, що повторює за морським огірком, зміг спокійно підняти м'яку кульку, а от пінцет і звичний жорсткий маніпулятор розчавили і впустили її. Andrew Choi et al. / Journal of Materials Chemistry A, 2021
На цьому дослідники не зупинилися і вирішили змусити SITuator стати рушієм для пливучого робота. Так вони створили зі свого актуатора вісім кубоподібних ніжок, які прикріпили до пластикового корпусу у 35 міліметрів, щоб той міг плисти на поверхні води за рахунок поверхневого натягу. Робот, якого назвали LocoBot, поплив за швидкістю у 7,2 сантиметра на секунду, що близько до швидкості жовтоперого тунця Thunnus albacares. У цьому йому допомогло почергове спрацьовування ніжок, які розгорталися у воді. Запрограмувати таке чергування можна різним складом SITuator та температурою підготовки, що впливає на швидкість гідратації. Останнім експериментом стало використання матеріалу у медичних цілях: на змодельоване розсічене поранення помістили невеликий зразок, який мав стягнути кінці рани. Так, щоб докласти зусилля у 0,06 ньютона менш ніж за п'ять секунд, SITuator знадобилося всього два мілілітри води температурою 40 градусів.
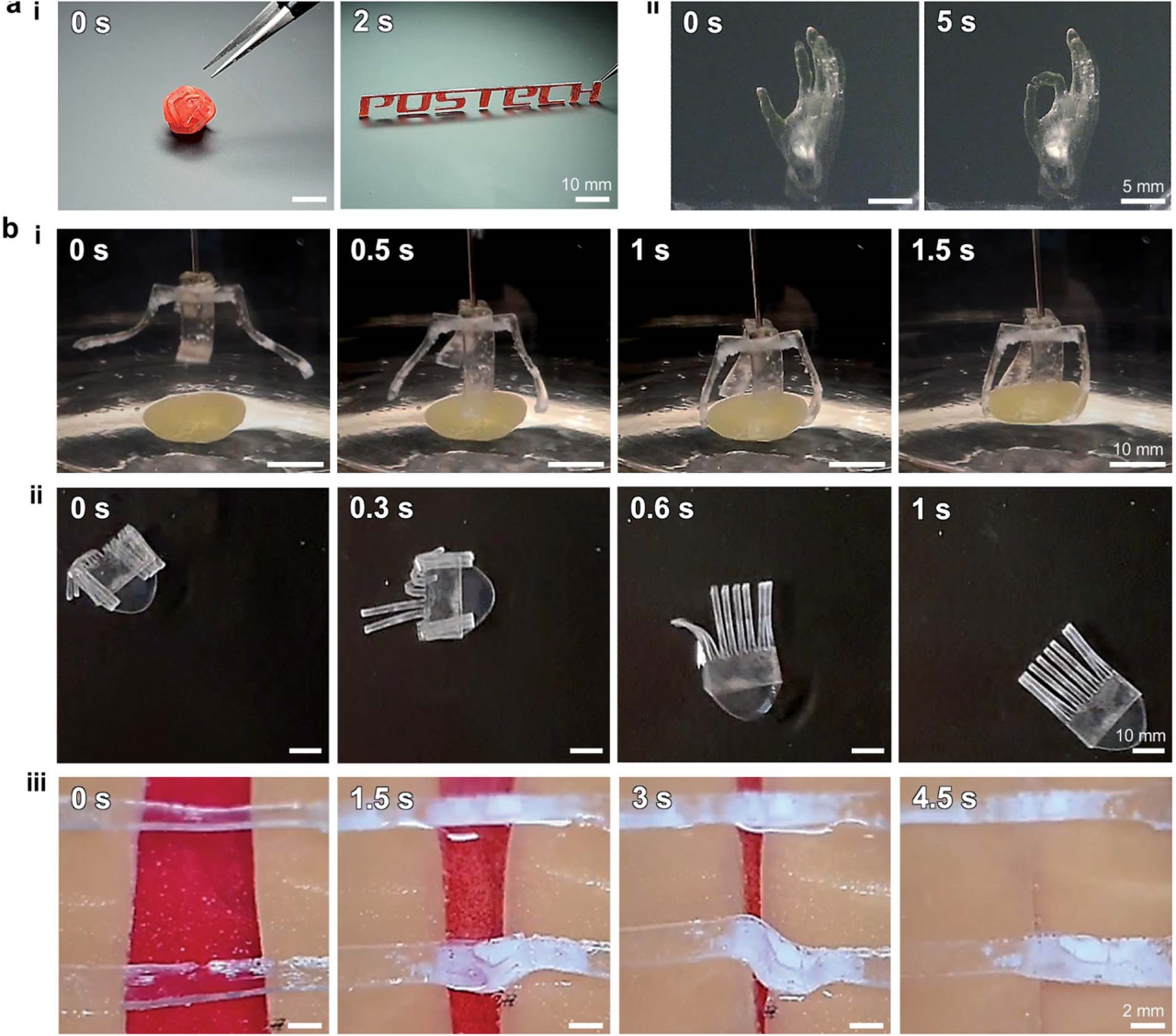
Проведені експерименти: (а) можливість матеріалу відновлювати свою форму під впливом води. (b) робота SITuator як маніпулятор, його назвали GrabBot. (c) ніжки з полімеру, з якими пластикова підкладка змогла поплавати зі швидкістю тунця. (d) зразок зміг стягнути краї «поранення». Andrew Choi et al. / Journal of Materials Chemistry A, 2021
Вище ми говорили про те, як вода дає змогу запускати м'яких роботів. Але, наприклад, схожому на міногу роботу, вона допомогла «відчути себе» та навчитися самостійно плисти навіть коли інженери позбавили його одного з моторів. А подібний до цього маніпулятор, тільки схожий на павука, також зміг вхопити дуже тендітний предмет — полуницю — завдяки воді у його суглобах.




