Швейцарські інженери розробили схожого на примітивних безщелепних водного робота AgnathaX, якого наділили здатністю відчувати м'язами тиск води, орієнтуючись на який йому вдалося самостійно навчитися плавати. Десять сервомоторів та датчики тиску вздовж тіла 125-сантиметрового роботизованого аналога міноги працюють як чутливі клітини, що визначають рух робота за силою води. AgnathaX змогла продовжити рух навіть коли інженери позбавили її одного з моторів, тому на їхню думку, робота можна використовувати для дослідження ритмічної м'язової активності і травм спинного мозку. Як робот здійснив заплив у шестиметровому басейні, вчені описали у Science Robotics.

EPFL Biorobotics Lab (BIOROB)
Як рухаються міноги і до чого тут роботи?
Робототехніка досить часто бере участь у дослідженнях локомоторних функцій безлічі різних тварин і субстратів. Рух роботів можна відтворювати, програмувати, що особливо цінно для вивчення руху у воді, яке є результатом складних взаємодій тіла і рідини. У своїй роботі інженери з лабораторії біоробототехніки політехнічної школи Лозанни, що у Швейцарії, взялися за основу безщелепних - дуже древню групу хребетних тварин, яка наразі представлену міногами і міксинами. Пересування хребетних тварин обумовлено взаємодією центральної нервової системи (головний і спинний мозок), периферичної нервової системи (нерви, що йдуть до м'язів і сенсорних нейронів), опорно-рухового апарату і навколишнього середовища. Взаємодії між центральною і периферичною нервовими системами складні, а зокрема обговорення центрального (прямий зв'язок) і периферичного (зворотний зв'язок) керування рухом є давньою дискусією щодо пересування тварин. Якщо взяти за основу, що рух обумовлюється периферичним механізмом, то плавник або кінцівка переміщаються в одному напрямку доти, поки не спрацьовує сенсорний сигнал, який говорить їм рухатися в іншому напрямку.
EPFL / YouTube
Однак, з відкриттям генераторів центральних патернів (central pattern generators, CPG), з'явилися аргументи на користь головної ролі все ж центрального механізму, де мережі ритмогенних нейронних ланцюгів можуть генерувати скоординовану активність навіть в ізоляції від сенсорного зворотного зв'язку. Але з часом ці ж генератори центральних патернів показали, що зворотний сенсорний зв'язок їм все ж потрібні - без неї частота рухової активності значно знижується. Також важливим спостереженням стала висока стійкість деяких хвилеподібних плавців, таких як вугри або міноги. Вони можуть продовжувати рух навіть не зважаючи на важкі травми спинного мозку, а отже і на рівні генераторів центральних патернів. Це наштовхує на думку, що сенсорний зворотний зв'язок може грати роль не лише у зміні патернів, а і у генерації скоординованих ритмів між різними частинами спинного мозку. Тому зі своїм напівм'яким роботом вчені зосередилися на хвилеподібних рухах, щоб перевірити гіпотезу про розподілені контури зворотного зв'язку. Робота AgnathaX спеціально розробили зі спеціальними розподіленими модулями вимірювання сили, які дали змогу дослідити вплив води на різні його частини та зв'язок рухових механізмів з ним.
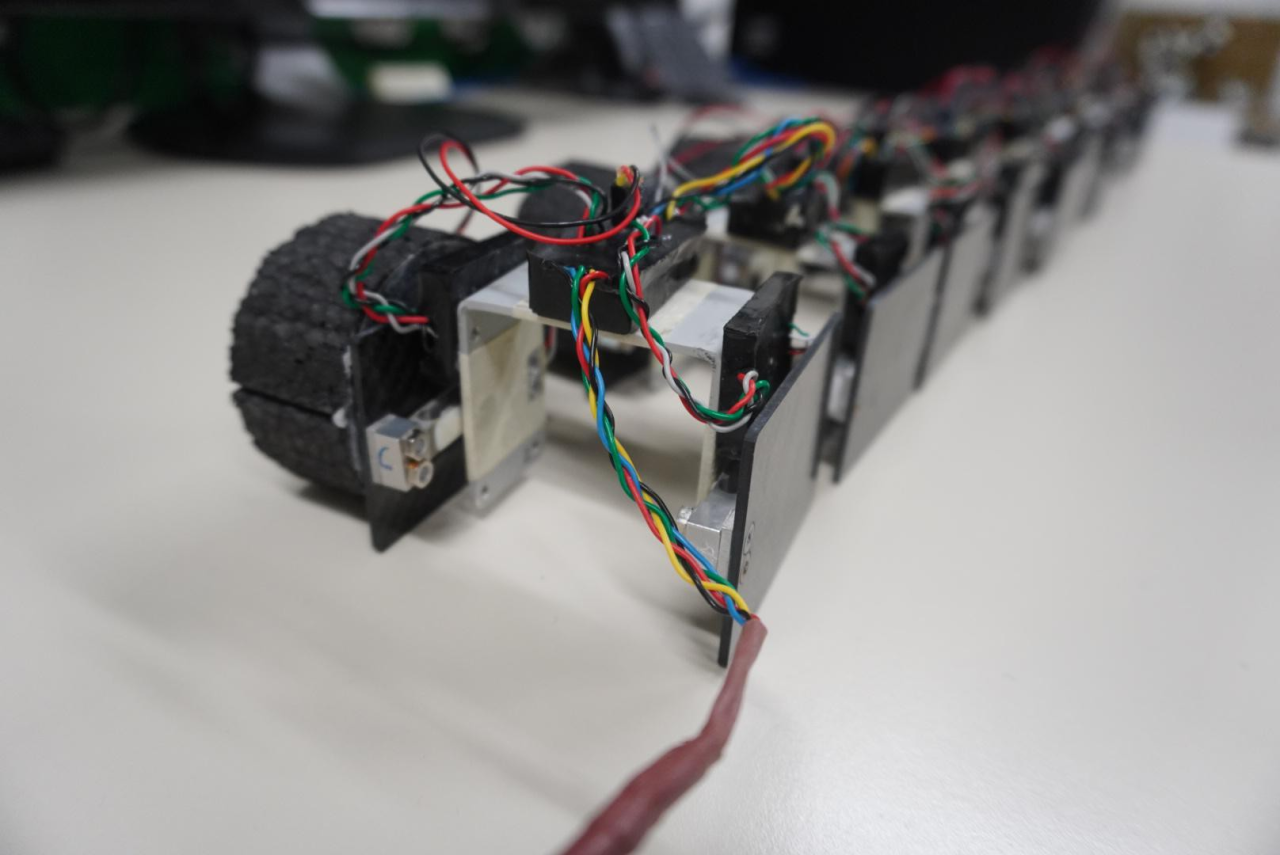
Сервоприводи AgnathaX / EPFL Biorobotics Lab (BIOROB)
Як роботу дати відчути воду?
У тварин, зокрема міног, сенсорний зворотний зв'язок забезпечується механорецепторними клітинами, які чутливі до дотику і тиску, таким чином надаючи інформацію про гідродинамічні сили, що локально додаються до тіла. У міног ці клітини називаються дорсальними клітинами, які мають свої рецептивні поля на бічних частинах тіла. За цим прикладом інженери розробили своєму роботу датчики гідродинамічної сили, які подібно міногам здатні генерувати ритмічну плавальну активність і координувати хвилеподібні рухи тіла. Нейромеханічна модель AgnathaX об'єднує сенсорне в'язкопружне тіло робота, спрощений спинний мозок, як розподілений набір локально пов'язаних десяти активних модулів тіла, головний пристрій для обчислень у голові та пасивний хвіст.
AgnathaX важить 4,2 кілограма та має довжину 125 сантиметрів. Робот керується безпровідно та може автономно плавати до 30 хвилин. Деформація тіла викликається ланцюжками, які почергово координуються після активації лівої і правої симульованої пари м'язів-антагоністів. Кожен локальний сегментарний контур вносить свій внесок в локальну деформацію тіла через здатність кожного сегмента відчувати бічні гідродинамічні сили, що діють на нього. На відміну від інших хвилеподібних плавальних роботів, які можуть вимірювати крутний момент в суглобах, що є формою пропріоцептивного зворотного зв'язку, AgnathaX має екстероцептивний. Причому кожна силова пластина може незалежно вимірювати позитивні або негативні значення відповідної гідродинамічної сили на своєму боці. Зверніть увагу, що оскільки пластини оточені водою з обох сторін, датчики не вимірюють гідростатичний тиск, що залежить від глибини, а сприймає сили поштовху і розтягування.

BIOROB-EPFL
То як поплив робот?
Робота запустили у басейн два на шість метра з глибиною у 30 сантиметрів, де протестували два типи деформацій тіла: створення хвиль з постійною однорідною амплітудою та з лінійно зростаючим градієнтом амплітуди від голови до хвоста. З'ясувалося, що локальна деформація тіла і гідродинамічні сили майже збігаються по фазі, причому піки гідродинамічних сил виникають трохи раніше піків деформацій. Щоб визначити, чи можуть гідродинамічні сили залучати сегментарну активність, для сегментної схеми також пристосували нейронну мережу Мацуока, що дає змогу досліджувати відповідні ролі центральних і периферійних механізмів шляхом вибіркової активації і деактивації цих механізмів в моделюванні і під час експериментів. Також щоб дослідити внесок кожного компонента схеми в підтримку швидкості плавання, дослідники ввели набір нейронних порушень: зменшення коливань, погіршення міжсегментарного зв'язку і приглушені датчики локальної сили. Так експерименти показали, що існують важливі функції, які забезпечуються периферійними механізмами, що можуть бути «приховані» центральними механізмами і відігравати важливу роль у відновленні рухової функції після травми спинного мозку. Екстероцептивні механорецептори можуть сприяти відновленню сенсорного зв'язку після розриву нервової системи, і таким чином сприяти координації плаваючих міног після травмування хребта (важливо, що для інших тварин цей зв'язок може відрізнятися). Інший важливий результат полягає в тому, що властивості тіла диктували сприйняття гідродинамічних сил, що призвело до тенденції робота до плавання вперед.
Це пояснюють тим, що своєчасної взаємодії між пасивним тілом і локальними вихорами достатньо, щоб змусити мертве тіло форелі плисти вперед за певних умов. Робот стійкий як до збоїв зв'язку між сегментами, так і до збоїв датчиків, оскільки міжсегментна координація забезпечується надлишковими механізмами (зверніть увагу, що з практичних причин ці збої тут моделюються програмно, а не застосовуються до обладнання). Тож представлений робот цілком може організовувати собі заплив самостійно. Це важлива функція для додатків, які потребують роботів, що надійно працюють у складних умовах (наприклад, труби, затоплені печери і замерзлі озера), де пошук або ремонт людиною неможливі. За словами дослідників, їхню платформу AgnathaX можна буде використовувати для перевірки додаткових гіпотез управління моторикою, які важко вивчити у тварин, що не брали участі у прямих експериментах. Наприклад, щоб визначити, як рухові команди взаємодіють з ефектами сенсорного зворотного зв'язку, коли тварині необхідно адаптувати свої рухи до турбулентних потоків, рідини різної в'язкості або для виконання рульових рухів, наприклад, при відстеженні мети.





