Інженери з Каліфорнійського університету наліпили роботу розміром з комаху електростатичні подушки на лапки, з якими він зміг подолати лабіринт менш ніж за шість секунд. Лапки допомагають йому розвити більше доцентрове прискорення за інших комах, а контролювати його можна, додаючи до них напругу. Робота планують використовувати для пошукових операцій або виявлення витоків газу, повідомляють вчені у Science Robotics.
Робот долає лабіринт. Jiaming Liang et al. / Science Robotics, 2021
Навіщо роботу наліпили електростатичні подушки?
Роботи будь-якого розміру не зможуть виконувати навіть звичайні завдання в складних середовищах, якщо не навчаться обходити перешкоди, координуючи свої як поступальні, так і обертальні рухи. Труднощі досягнення високої маневреності будь-якого робота полягають в тому, що необхідно мати дуже високу лінійну швидкість руху при збереженні здатності здійснювати повороти. Зокрема, робот, що швидко рухається може втратити стійкість при виконанні поворотних рухів через ефект інерції. Виконання цих вимог значно ускладнюється для м'яких роботів через їхні структурні обмеження — висока гнучкість та деформованість. Наприклад, звичайні роботи з твердим тілом можуть розвертатися, почергово рухаючи кінцівками. Але через низьку жорсткості конструкції м'яких роботів, їхня здатність керувати рухом окремих кінцівок значно знижується. І тому м'які роботи невеликих розмірів, що ідеально підходять для пошуково-рятувальних операцій, розміщення датчиків у складних для доступу чи небезпечних середовищах, потерпають від можливості робити це швидко.
У природі тварини, які мають гнучкі тіла, можуть керувати своїми траєкторіями, послуговуючись можливістю краще кріпитися до поверхні — в забезпеченні прилипання гекона, наприклад, звинуватили його хвіст, а у клопів водомірок є гідрофобні волоски на лапках, якими вони тримаються на воді. Натхнені подібними стратегіями із тваринного світу, інженери розробили прототип м'якого робота масою 65 міліграмів із тонкої зігнутої п'єзоелектричної плівки в кілька шарів, яка згинається і стискається додаванням до неї електричної напруги. Дві електростатичні опори для ніг забезпечили роботу високу швидкість, а також необхідне тертя для крутих поворотів. Силу тертя між електростатичними подушечками для ніг і поверхнею можна незалежно регулювати, змінюючи напругу.
Робот ппродовжив рух після падіння на нього коробки, що у 200 разів важча. Jiaming Liang et al. / Science Robotics, 2021
Як він бігає?
Конструкцію свого робота ця група інженерів вперше представила ще два роки тому — тоді він міг бігати зі швидкістю близько 1,6 кілометра на годину, майже як і справжні таргани. Але він показав низьку маневреність і погану керованість траєкторії. Тому цього разу його наділили двома електростатичними подушечками для ніг. Подача напруги на будь-яку з подушечок збільшує електростатичну силу між роботом і поверхнею, змушуючи його лапки більш щільно прилягати до неї, змушуючи самого робота обертатися навколо них. Це і забезпечує необхідну маневреність та контроль над траєкторією із можливістю здійснювати повороти з доцентровим прискоренням у 28 одиниць довжини тіла в секунду. За словами дослідників, ці показники є найвищими серед усіх невеликих м'яких роботів та навіть кращі за деяких наземних членистоногих, у тому числі тарганів.
Їхній робот може бігати також і з корисним навантаженням в 1660 міліграмів — батарейкою та фоторезисторами для автономної роботи, а також із 180-міліграмовим датчиком, який приблизно в 2,8 раза важчий за робота. Сенсор використовується для запису карти його маршруту, а також може визначати концентрації газу і джерела його витоку. Із датчиком робот може пройти заданий шлях з дев'ятьма тимчасовими зупинками (по 60 секунд в кожній точці) для створення мапи концентрації газу. Так він за 36,9 секунди, якщо без зупинок.
Навіщо його відправили лабіринтом?
Щоб продемонструвати маневреність робота, дослідницька група прослідкувала, як робот пробіг побудованим вченими лабіринтом із LEGO. У повному екіпіруванні він знайшов джерело витоку етанолу на трасі довжиною у 27,9 сантиметра в формі літери «S» за 36,9 секунди, а під керівництвом інженерів без обладнання справився із шляхом у 120 сантиметрів всього за 5,6 секунди. Для коригування траєкторії руху прототипа, вчені вручну подавали електричні сигнали з певними послідовностями. Загалом під час експериментів робот зміг 13 разів змінити траєкторію. Також його навчили долати невеликі перешкоди — за 0,29 секунди він переліз сходинку висотою 2,4 міліметра, що становить приблизно половину його власної висоти. Під час автономної роботи, на робота навісили два фотодатчики та акумулятор загальною вагою у 1,66 грама. З ними його швидкість знизилася до 1,2 довжини тіла в секунду та до 0,4 із навантаженням у 2,5 грама. Фотодатчики були необхідні роботу для розвертання — натхнені світлобоязню у деяких комах, вчені керували роботом за допомогою лазерної вказівки. Так він зміг самостійно у 31 метр за 19 хвилин зі швидкістю у 27,2 міліметра на секунду.
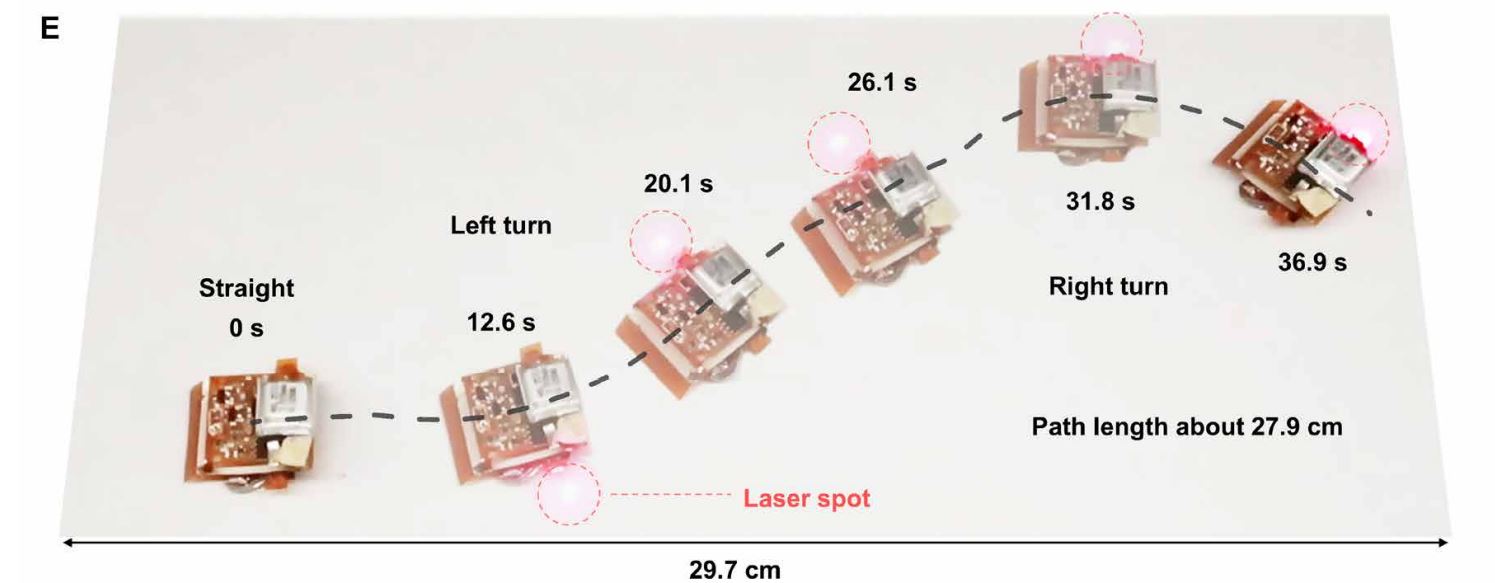
Робот розвертається під дією лазерної вказівки. Jiaming Liang et al. / Science Robotics, 2021
Щоб перевірити надійність робота, вчені вирішили покидатися у нього предметами з висоти та наступити на нього. Так коробку, яка в 200 разів важча за нього, впустили з висоти 50 сантиметрів. Робота вона причавила, але за 40 мілісекунд він сам звівся на лапки, але хоч і став дещо менш маневреним, його швидкість інженери оцінили у 7,7 бала без особливого погіршення характеристик. Більше того, коли один з них, вагою у 55,3 кілограма, вирішив наступити на свою розробку, навіть тоді робот зберіг свої можливості повороту і бігу з відмінною надійністю.
Одна з найбільших проблем сьогодні — це створення роботів меншого розміру, які збережуть потужність і контроль дій, так само як і більші та жорсткі роботи, яким не складно носити великі акумулятори та системи управління. Розробка вчених, як показали експерименти, виявилася достатньо сильною, витривалою та швидкою, щоб нести датчики і електроніку, а також акумулятор, та при цьому виконувати важливу функцію з пошуку витоків газу. Із подібними цілями вчені вже причепляли до живого таргана електроніку, щоб він міг брати участь у пошукових операціях, наділяли робота можливостями пересування ящірок, щоб він міг лазити стінами, а також знайшли новий спосіб «приклеювати» робота до поверхонь за допомогою вібрацій.





