Чашка з рідиною є складним об'єктом із безліччю ступенів свободи, з якими нам доводиться справлятися, поки ми переносимо її з одного місця в інше. І фізики з'ясували, що існує дві стратегії, щоб максимально ефективно і без втрат донести філіжанку кави: синхронізація коливань рідини і чашки або, навпаки, їхня розсинхронізація, де коливання один одного компенсують. Ми вміємо природно перемикатися між цими підходами, повідомляють вчені у Physical Review Applied, але роботи, яким трапляться подібні завдання —ні. Тож розуміння того, як нам вдається не розливати дорогою каву, є необхідним фундаментальним дослідженням для безпосередньо прикладних задач.

Unsplash
Навіщо знадобилася теорія «кавоносіння»?
Якщо ви маєте справу з чимось, що має свої внутрішні ступені свободи, тобто певну кількість координат для переміщення чи будь-якого іншого руху, які безпосередньо не контролюються ззовні —це складний об'єкт, який буде досить складно описати. Ще більше ситуація ускладнюється, якщо хтось починає взаємодіяти із цим складним об'єктом —тоді ці внутрішні «шестерні» і їхні особливості складаються із особливостями того, як ними маніпулюють. Вирахувати детальну фізику ланцюжка таких взаємодій є зовсім не тривіальною задачею. Наприклад, спроби врівноважити жердину на кінчику пальця за допомогою контрольованих невеликих рухів. Або ж класичним прикладом є здатність людини ходити з нормальною швидкістю, несучи чашку гарячої кави, не проливаючи її. Майже всім нам доводиться гуляти з чашкою кави та навіть проливати напій, але це знайоме явище ніколи не досліджувалося систематично.
Так гаряча кава, як будь-яка інша нормальна термічно змішувана рідина, яку помістили у місткість, зі своїми внутрішніми ступенями свободи починає взаємодіяти з чашкою, яка своєю чергою, починає взаємодіяти із людиною-носієм. І хоч, на перший погляд, такий «дар» одразу пристосовуватися до такої складної системи і керувати нею, здається природним, ми не маємо жодного уявлення про ці взаємодії, особливо на кількісному рівні, не кажучи вже про аналіз впливу зовнішніх збурень від навколишнього середовища. Але на детальний опис фізики цих маніпуляцій вчені мають великі надії, адже тоді з'явиться можливість не просто зробити роботів не менш вправними за людей, а і враховувати це для інтерфейсів мозок-комп'ютер чи для реабілітації пацієнтів після втрати моторних здібностей.
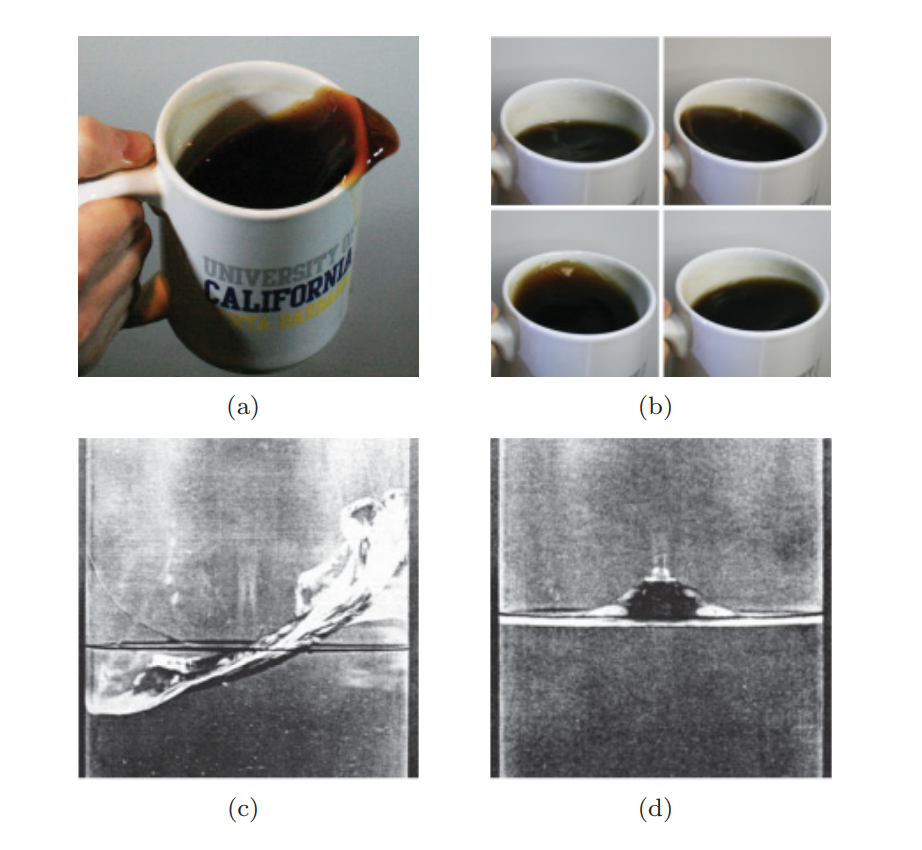
Ключові рухи рідини у рухомій чашці, що спричиняють розливання: оборотно-поступальні рухи (с), а також вертикальні коливання (d). H. C. Mayer and R. Krechetnikov / Physical Review E, 2012
Як ми носимо каву?
Попередні дослідження, щоправда, зосереджені на тому, чому кава проливається, а не навпаки, дійшли висновків, що у носінні напоїв є два різних стабільних режими взаємодії людини з філіжанкою: синфазна і протифазна синхронізації у низькочастотному і високочастотному режимах відповідно. У цих дослідах вчені Аризонського університету на чолі з Брентом Волесом (Brent Wallace) змушували людей ходити з чашею, в якій катався м'ячик, та просили ритмічно нею керувати, але щоб м'яч залишався у чашці. Виявилося, що така система має чотири змінних: зміщення і швидкість чаші, а також кут повороту і кутова швидкість м'ячика. У типових експериментальних умовах все чотири демонструють періодичні або майже періодичні коливання. І власне низькочастотними вважають коливання зі значенням в приблизно 0,66 герца, а високочастотними —частоту приблизно в 1,18 герца. І саме вони визначають те, наскільки успішно ми донесемо чашку з кавою до цілі. У першому випадку, людина, яка повільно рухається із чашкою кави у руках, має ту саму фазу руху руки, що і гаряча рідина у чашці.
Однак, оскільки, ми впевнені, вам доводилося втримувати каву у межах чашки і на бігу, то вам, хоч і несвідомо, доводилося обирати другий режим —протифазний. Так коливання набагато більші, але рух рідини і вашої руки зміщують на 180 градусів по фазі, що і компенсує силу. Вчені підозрюють, що поки вони несуть каву до своїх робочих місць, вони так само несвідомо можуть поєднувати обидві стратегії, плавно (або ні) перемикаючись з однієї на іншу. І саме розкриттям того, як цей перехід відбувається з динамічної точки зору, і зайнялися дослідники у цій роботі. На їхню думку, саме відповіді на це фундаментальне питання не вистачає прикладним робототехнічним задачам.
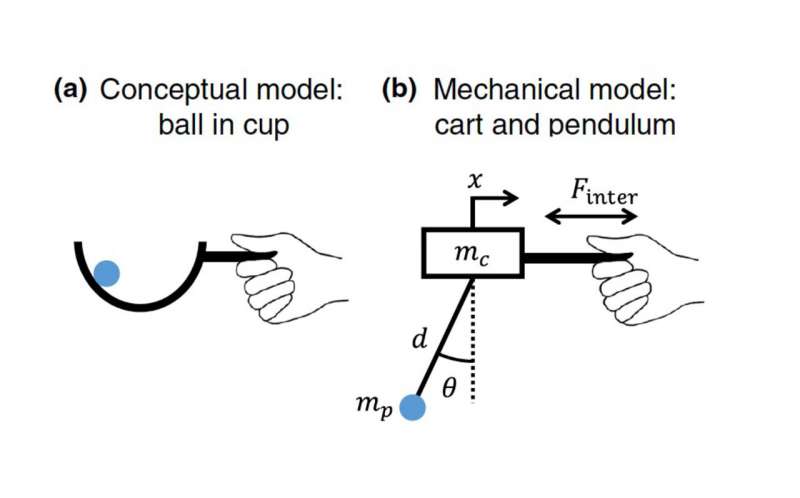
Схема експериментів з кулькою і чашею для імітації носіння кави, а також створена для опису нелінійна механічна модель маятника, прикріпленого до рухомого об'єкта. Brent Wallace et al. / Physical Review Applied, 2021
То як найкраще носити каву?
Оскільки раніше вже було доведено, що особливості поширених розмірів чашок, властивостей кави і біомеханіки ходьби є причиною явища проливання, варто було дізнатися, як ми цю причину можемо найбільш ефективно компенсувати. Використовуючи нелінійну динамічну модель маятника, прикріпленого до рухомого візка (руки), схильного до зовнішнього періодичного впливу, вченим вдалося досконало дослідити перехід між синфазною і протифазною синхронізацією. Так з'ясувалося, що у режимі слабкого впливу, тобто якщо чашка з кавою утримується не так щільно, перехід може бути досить різким в тому сенсі, що невелика зміна частоти може негайно привести до перемикання між двома стратегіями. Якщо ж ви міцно вхопилися за чашку, то для переходу потребується значна зміна частоти коливання, тож виникає перехідна область між синфазною і протифазною синхронізаціями, де рух руки із об'єктом у ній не синхронізовані. Загалом, результати показують, що люди можуть різко і ефективно перемикатися з одного синхронного режиму на інший. І цей механізм можна використовувати для розробки інтелектуальних роботів, щоб ті адаптувалися для обробки подібних складних об'єктів у мінливому середовищі.
У своїй роботі дослідники навіть запропонували принцип для розробки вправного м'якого робота: так, якщо він спроєктований для ходьби з невеликою довжиною кроку, яка приблизно відповідає невеликій амплітуді впливу у створеній моделі «маятник-рука», то основна динаміка буде приблизно лінійною, а частота ходьби може бути довільною для створення такої фазової поведінки. Якщо ж крок буде великим та збігатиметься з амплітудою впливу на чашку, слід уникати частотного інтервалу, пов'язаного з перехідною областю, тому що складні фазові стосунки між роботом та складним об'єктом може порушити плавне поводження з ним.
Подібні дослідження допоможуть робототехніці використовувати більш точні моделі для навчання і, наприклад, роботу, що їздить на кулі, про якого ми нещодавно писали, було б легше балансувати зі склянками води у руках, а телекерованому роботу для чашки не знадобилася б таця.





