Американські інженери застосували технологію штучного інтелекту, щоб покращити точність керування протезом руки, під'єднаним до нервової системи користувача. Завдяки цьому учасники дослідження змогли у природний спосіб керувати пальцями та кистю біонічної руки силою думки із точністю до 99 відсотків, повідомляється у статті журналу IEEE Transactions on Biomedical Engineering. Один із добровольців навіть пограв у відеоігри завдяки технології подумки.

Diu Khue Luu / IEEE Spectrum
Як рухаються біонічні руки?
Довгий час людям, які втратили руку, лікарі могли запропонувати протез, який хіба що за виглядом нагадує справжню кінцівку. Але розвиток науки й технологій призвів до розроблення біонічних протезів, що слугують не лише косметичній меті, а й функціонально відтворюють втрачену частину тіла, маючи подібну їй рухливість. Сучасні варіанти оснащені декодерами, які сприймають сигнали від уцілілих частин руки та обробляють у такий спосіб, щоб штучна рука рухалася так, як того бажає користувач.
Найпростіші такі системи «передбачають», який рух хоче виконати людина, завдяки скороченням м'язів, що залишилися, і вимагають тренувань для їх освоєння. Наприклад, якщо людина хоче, щоб її біонічна рука стисла кулак, то має поворухнути м'язами в одній послідовності, а щоб вона показала палець — в іншій, і так далі. І хоча такі протези доступніші та не інвазивні, вони набагато менш точні (у реальних умовах мають точність близько 82 відсотків), ніж складніші варіанти, що під'єднуються до нервової системи. Найкращий ефект дають протези, що через імплантат формують із мозком єдиний інтерфейс мозок-комп'ютер, тому керуються, як звичайна рука. Але їх наздоганяють і менш травматичні штучні кінцівки типу нейрокомп'ютерний інтерфейс, що зв'язуються не з центральною нервовою системою, а із уцілілими периферійними нервами кінцівки. У такому разі імплантати вживляються у нерви руки, які колись приводили у рух відповідні м'язи, а тепер будуть — механізми протезу. Інженери з Університету Міннесоти, Південно-західного медичного центру Техаського університету та компанії Nerves Incorporated спробували вдосконалити цю технологію за допомогою штучного інтелекту (ШІ).
До чого тут штучний інтелект?
Коли пацієнт із біонічною рукою, пов'язаною з периферійними нервами, бажає поворухнути нею, сигнал про це з мозку доходить до тих самих периферійних нервів, де вловлюється декодером. Завданням останнього є в реальному часі правильно інтерпретувати сигнал та передати до протеза у вигляді команди виконати саме бажану людиною дію. Цей «переклад» сигналу від нервів до протеза вимагає опрацювання значної кількості інформації, тому далеко не завжди він відбувається безпомилково.
Автори нової роботи подумали, що допомогти може технологія ШІ, що навчається та оперує величезними обсягами даних. Перевіряли це в дослідженні на трьох дорослих добровольцях з ампутованою рукою та імплантованими електродами для керування протезом. Під час навчання штучного інтелекту розпізнавати сигнали електроди в ампутованій руці під'єднували до комп'ютера, і так само, під'єднували до комп'ютера здорову руку, натягнувши на неї рукавичку з сенсорами, що обробляє рухи руки. Тоді учасники намагалися здійснити різні жести обома руками — здоровою та фантомною. Так ШІ вчився розпізнавати нервові сигнали в ампутованій руці, зіставляти їх із відповідними жестами та запускати їх відтворення біонічною рукою.
Як показала себе технологія в тестуваннях?
Загалом технологія продемонструвала високу ефективність у керуванні біонічною рукою, однак не всі жести супроводжувалися однаковим успіхом Так, найкращими були результати ШІ стосовно розпізнання рухів безіменним пальцем та мізинцем, ймовірно тому, що інформація про це надходить із одного, ліктьового нерва. Точність розпізнавання жестів складала до 86,3 відсотка для одного учасника, 97,9 — для другого, і 98,4 — для третього. Низькі результати першого пояснюють тим, що він мав електроди лише в ліктьовому нерві, тоді як інші ще й у серединному, а також виконав менше жестів через необхідність завчасно покинути дослідження. З другим учасником лише трохи не дотягли максимальної точності розпізнавання, але вчені наголошують, що він виконував більше жестів, зокрема такі складні, що вимагають використання кількох пальців одночасно, як-от указування, щипання та «коза».
Що ж до виконання самих жестів, то загалом для всіх рухів успішність склала 99,2 відсотка. Час реакції при цьому сягав 0,81 секунди, а оброблення інформації — 6 біт в секунду. Один із учасників проносив імплантат протягом 16 місяців, і за цей час вчені не спостерігали погіршення його функціональності, а навіть навпаки, за умови тонкого доналаштування раз на кілька місяців.
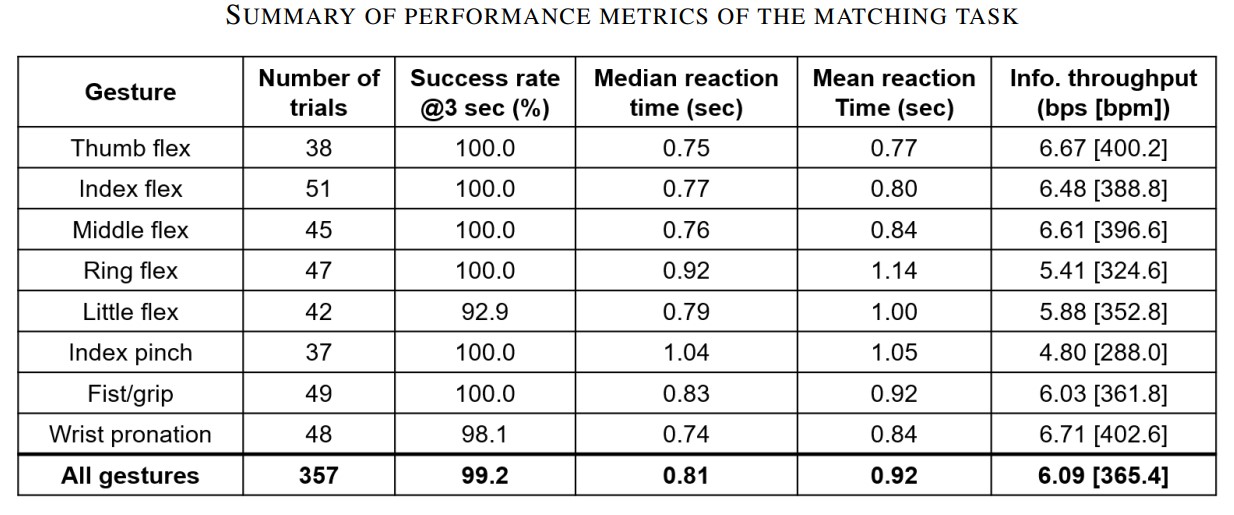
Показники виконання різних жестів протезом із ШІ-декодером. Diu Khue Luu et al. / IEEE Transactions on Biomedical Engineering, 2022
Автори вважають, що запропоновану ними технологію можна вдосконалити, щоб повернути людям із ампутованою рукою не лише колишню моторику, а й можливість відчувати дотики, вібрацію та температуру. Власне, вони вже проводять відповідні дослідження. А крім того, один із учасників успішно використав ШІ-декодер для гри у відеоігри силою думки. Тож можливо, що з його допомогою віддалено можна керувати й іншими пристроями, наприклад, дроном або роботом, що вчені називають справжнім «телекінезом».




