Американські інженери розробили алгоритм, який допоможе роботам краще орієнтуватися у місцевості та долати перешкоди. Його суть у тому, щоб показати роботу, що можна спиратися руками на стіни. Так людиноподібний робот у моделюванні в три рази успішніше знаходив зручний шлях, краще визначав складність маршруту і навіть справився зі сходами. Алгоритм також випробували на колісному роботі, якого помістили на похилу дошку, та наділили двома «руками», а статтю про роботу прийняли до публікації у Autonomous Robots.
University of Michigan ARM Lab / YouTube
Що досі заважало роботам спиратися на стіну?
Двоногі роботи все ще обходять своїх родичів з іншою кількістю кінцівок якщо справа заходить у сферу пересіченої місцевості. Колісний, гусеничний, багатолапий або літаючий робот все ж має обмеження у тих середовищах, які може долати, і тому навряд так само швидко пройдеться болотяною місцевістю, за якою слідує галька, пісок або скелясті виступи. Тож оскільки ви зі своїми двома кінцівками можете переносити тіло і лісом, і сходами, і повз калюжі, інженери все ще дивляться в бік двоногих людиноподібних роботів, щоб відправляти їх у незручні місцевості.
Втім, поки вони використовують квазістатичні сценарії руху, за яких проєкція центру мас робота завжди знаходиться всередині зони контакту ноги з поверхнею. Так вони все ще виходять з рівноваги і падають. Також і розроблені інженерами алгоритми планування руху зазвичай розглядають лише місця для кроків, не враховуючи, що своїх роботів вони наділили ще і руками, які можуть допомогти їм уникнути перешкоди або зберегти рівновагу. Але на це є свої причини: планування послідовності контактів робота із середовищем, особливо великим і складним, значно збільшує кількість можливих маршрутів, а отже і час їхнього планування роботом.
То може і не потрібні роботам руки?
Так, долоні накладають більш суворі обмеження на досяжність контакту, і так, уникнути падіння можна і послуговуючись лише ногами. Існує багато стратегій, які допомагають якщо не втримати робота у рівновазі, то принаймні зменшити збитки від його падіння. Наприклад, так звані «захисні кроки», які додатково здійснює робот, щоб зупинити або сповільнити швидкість свого падіння. Також інженери звертаються і до «аналітичних» кроків — нещодавно ми розповідали, як шестиногого робота навчили однією ногою промацувати поверхню перед тим як ступати на неї. Втім, подібні запобіжні кроки можуть виявитися неможливими, якщо робота запустити у захаращене середовище із перешкодами не лише під ногами, а і на рівні тіла, як-то стінами чи столами. Вони обмежують місце для виконання таких запланованих кроків і перешкоджають відновленню робота після падіння. Тож вчені все ж планують ці перешкоди використати, щоб не втратити свого робота та дати йому змогу стати максимально стійким. У своїй роботі дослідники з Мічиганського університету Ю-Чі Лін (Yu-Chi Lin) та Дмитр Беренсон (Dmitry Berenson) взялися за створення алгоритму, який допоможе роботам планувати свої рухи у великих неструктурованих середовищах, використовуючи не тільки контакти для ніг, але і для рук, щоб навчитися краще балансувати та мати більше варіантів маршруту. Довгострокове планування особливо важливе для швидкого реагування, оскільки може значно заощадити час виконання завдання, даючи роботу можливість уникнути потрапляння у глухі кути та необхідності відступати у пошуку обхідних шляхів. Новий алгоритм дозволить роботам визначити, наскільки складна місцевість, перш ніж розрахувати успішний маршрут вперед, який відтепер може містити закріплення на стіні однієї або двома руками при виконанні наступного кроку вперед.
Як пояснити роботу, на що можна спертися?
Команда інженерів використала підхід розділення, розбиваючи шлях для робота на два типи місцевості. Ділянки, які важко подолати, де він зможе використати свій алгоритм планування, а також ділянки з полегшеною місцевістю, де використовується простіший метод планування шляху і робот просто продовжує рух. Працює це так: алгоритм користується функцією, яка прогнозує кількість корисних кроків у заданому регіоні, де корисність визначається як можливість пройти якнайбільше у певному напрямку. Ця оцінка показує, наскільки складно роботу буде знайти контакти з навколишнім середовищем (твердо стояти на ногах), а отримуючи її, алгоритм направляє робота у бік місця, де місць для таких контактів буде більше. Також за допомогою набору раніше згенерованих траєкторій руху робот також перевіряє середовище на відповідність тим моделям, що йому показали раніше під час навчання.
Цей підхід безпосередньо оцінює всю траєкторію, що набагато ефективніше, ніж окреме планування на основі пошуку контактів у захаращених частинах середовища. Ключем всієї концепції є саме баланс між цими підходами протягом тривалого періоду планування. Знаючи про особливості свого тулуба, робот починає рух, оцінює середовище та думає, що з ним робити далі. Оскільки дотик долонею доступний не у всіх місцях, а іноді і не потрібні, планувальник руху тулуба також вказує режим руху — різні комбінації долонь і ніг. Так шлях сегментується на основі прогнозів прохідності для кожного режиму. Як ми вже вказали, результатом цього процесу є сегменти з високою або низькою прохідністю, за якими і призначається підхід.
Віртуальний робот прямує з однієї кімнати в іншу, уникаючи перешкод. University of Michigan ARM Lab / YouTube
Як робот скористався можливістю?
Спершу свій алгоритм вчені вирішили перевірити на віртуальному людиноподібному роботі, якого відправили пройтися двома захаращеними кімнатами через коридор, а також піднятися віртуальними сходами. У всіх середовищах перешкоди генерувалися випадковим чином у вигляді пласкої поверхні або куп щебеню із двадцятиградусними нахилами. Подібним чином з'являлися і стіни. Випробування вважалося успішним, якщо алгоритму вдавалося знайти найкращий маршрут за вісім хвилин. Алгоритм команди перевершив попередні методи як по успіху, так і за загальним часу на планування, що важливо, коли ситуація вимагає швидкої реакції. У ході більше 50 випробувань робот досяг мети в 84 відсотках випадків у порівнянні з 26 відсотками для стандартного підходу до планування. А на формування маршруту пішло трохи більше двох хвилин порівняно з більш ніж трьома хвилинами для звичайного алгоритму.
Віртуальний робот піднімається сходами. University of Michigan ARM Lab / YouTube
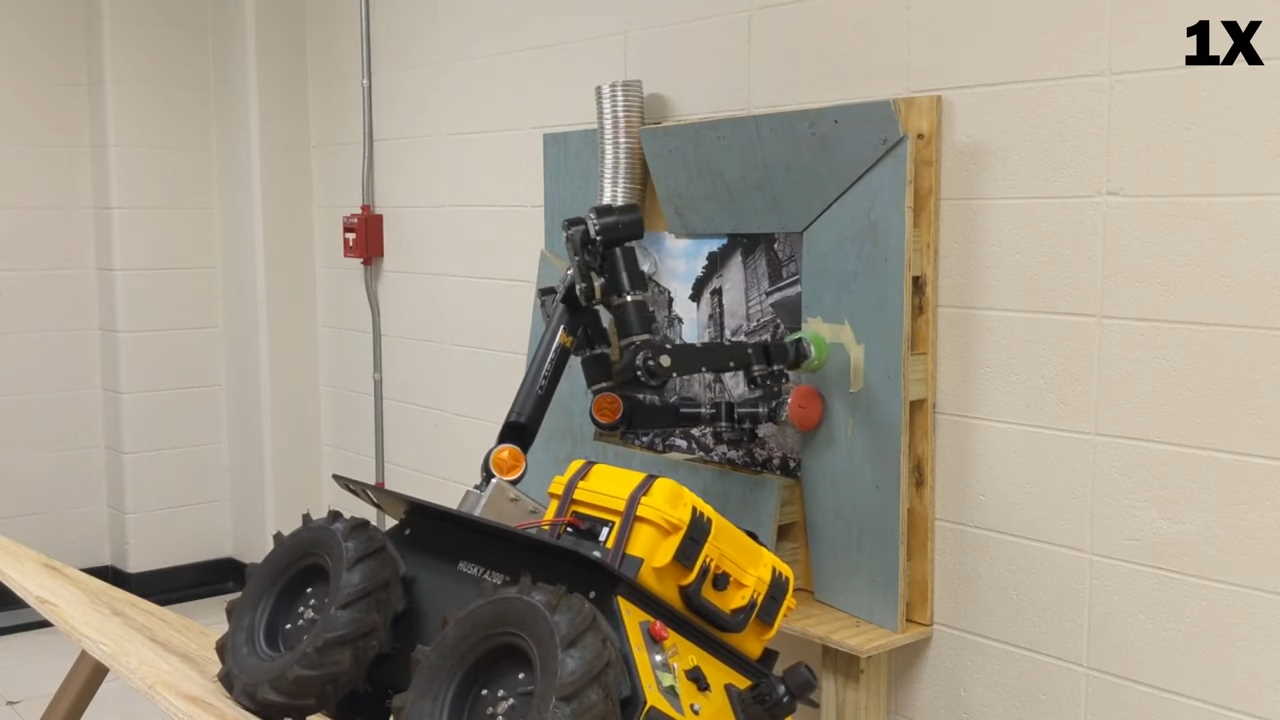
Також дослідники продемонстрували роботу реального робота із цим алгоритмом. Так мобільний дворукий маніпулятор (руки мали сім ступенів свободи) на колісному роботі мав перетнути «місце землетрусу», рухаючись похилою дошкою. Рухатися нею можливо лише якщо зачепитися руками за стіну, причому потрібно обрати один з двох шляхів: над вікном або під вікном. Так з новим методом роботу знадобилося трохи більше ніж за десяту частку секунди, щоб спланувати рух, порівняно з більш ніж 3,5 секундами з базовим планувальником.
Колісний робот намагається втриматися на рампі. University of Michigan ARM Lab / YouTube





