Американські інженери запропонували новий підхід глибинного навчання з підкріпленням для роботів, що мають датчики сили і зору, який допоможе їм долати двері. Колісний робот справився із дверима, що самостійно закриваються, відшукавши у них ручку і притримуючи її «спиною», щоб вільно проїхати. Двері були йому незнайомі, так само як і траєкторія, пояснюють розробники у IEEE Access, а метод виявився стійким до зміщення камери і шуму у даних датчиків.
Yufeng Sun et al. / IEEE Xplore, 2021
Які у роботів проблеми з дверима?
Оскільки роботи у більшості своїй оволоділи екстероцептивними датчиками — камери і лідари допомагають їм орієнтуватися у просторі «на власні очі» — їх вже можна було б використовувати для більшості завдань. Наприклад, для прибирання, доставки чи супроводу. Роботи є головними кандидатами на тих, хто допоможе людям менше контактувати з часто небезпечним середовищем і переберуть на себе більшість монотонної роботи.
Однак широко поширити роботів не лише виробництвами, а і офісами, лікарнями чи школами заважають, як не дивно, двері. Роботи легко вчаться прокладати собі маршрути та обходити перешкоди, але навчитися справлятися із дверима різного розміру, різного принципу роботи та навіть з різними сторонами відкривання, їм все ще складно. Тож щоб випустити роботів з дослідницьких лабораторій, потрібно або стандартизувати усі двері, або ж навчити роботів справлятися з ними не гірше за людей. Власне цим і зайнялися інженери Каліфорнійського університету, та спробували знайти алгоритм, який відкриє колісному роботу без рук двері.
Змодельоване середовище для завдання з відкривання дверей. Yufeng Sun et al. / IEEE Xplore, 2021
Чому новий робот без рук?
Автономне відкривання дверей є складною задачею, яка вимагає від робота вміння знайти дверну ручку та скористатися нею. Найбільше труднощів приносять двері з механізмами, що закривають їх, адже тоді роботам потрібно прикладати набагато більше зусиль — тримати її весь час, який потрібен, щоб пройти крізь неї. Ця робота, звісно, є не єдиною, де роботів привчали до самостійного відкривання дверей.
Відкривання дверей містить у собі чотири підзадачі: виявлення дверної ручки, наближення до дверей, взаємодія з ручкою та власне відкривання дверей. І річ у тім, що більшість досліджень використовує для цього маніпулятори — дорогі конструкції з принаймні шістьома ступенями свободи, які вимагають додаткових моделювань. Необхідність у додатковому маніпуляторі віддаляє роботів від відкривання собі дверей у більшості середовищ.
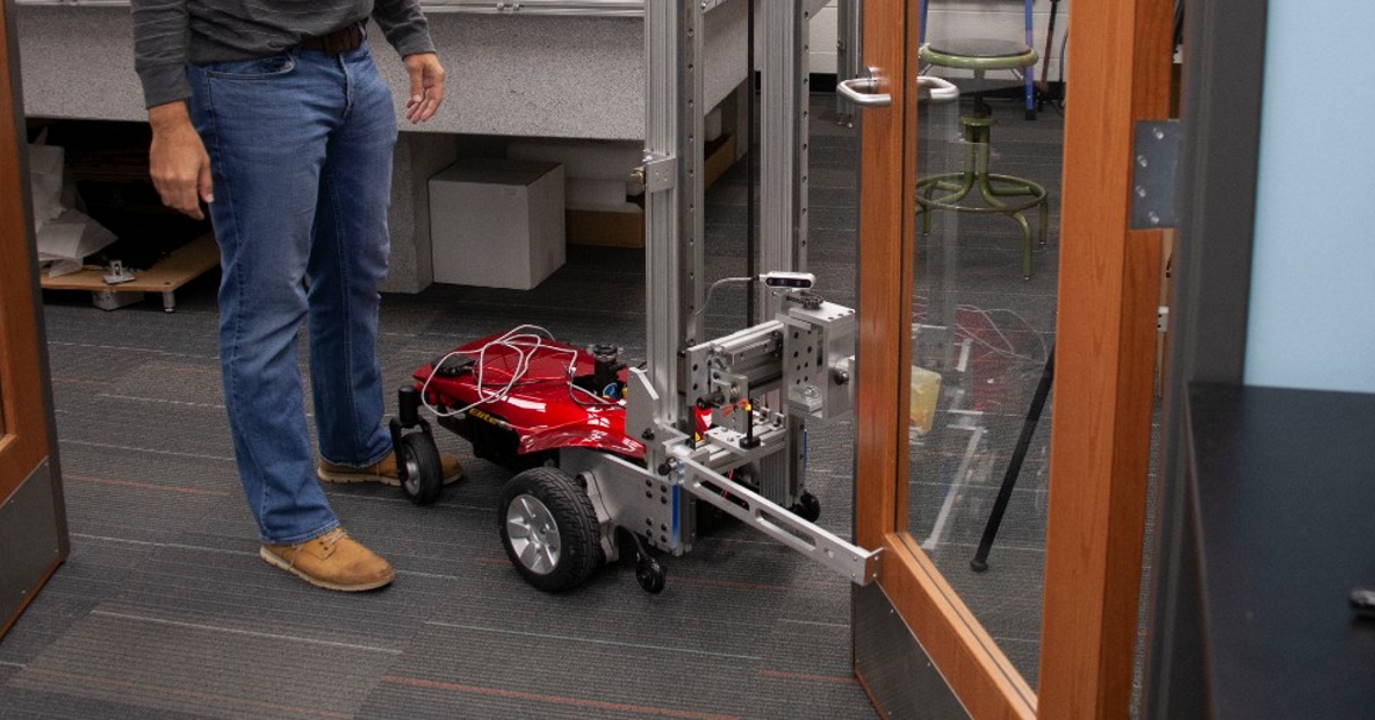
Але у своїй роботі дослідники представили метод, який об'єднує для робота дані від камер і датчиків сили та за допомогою глибинного навчання з підкріпленням допомагає йому виконати найскладніший етап завдання — відкривання дверей з механізмом закривання і проходження крізь них. Для цього роботу необхідні лише колеса і нескладний механізм, з яким він зможе маніпулювати дверною ручкою, тягнути двері і притримувати їх.
Yufeng Sun et al. / IEEE Xplore, 2021
Як він справився?
На думку вчених, комбінація камер і силових датчиків здатна забезпечити роботу необхідну безпеку за менших обчислювальних потужностей. Вони запропонували метод об'єднання датчиків сили і зору на основі глибинної нейромережі, який може замінити додаткові маніпулятори. Так робот знаходить двері, відкриває їх за допомогою портативного механізму, починає проїжджати і підтримує двері вже своєю «спиною», що допомагає подолати перешкоду.
Результати тестування показують, що ймовірність успіху росла саме з об'єднанням камер і датчиків сили — до 92 відсотків, у той час, як дві камери давали успіх всього у 55 відсотках спроб. Дослідники пов'язують це з вищою стійкістю до зашумлених даних, адже силові датчики здатні компенсувати навіть зміщення камери. Крім того, алгоритм, за словами дослідників, є придатним до усіх дверей, а не лише тих, що траплялися у моделюванні, адже не потребує заздалегідь спланованої траєкторії. Наступним кроком дослідження стане випробування підходу на реальному роботі.