Британські інженери розробили гнучкого підводного робота, який може плавати зі швидкістю одна довжина тіла в секунду, що еквівалентно швидкості медузи аурелії вухастої (Aurelia aurita). Робот схожий на парасольку та має вісім надрукованих на 3D-принтері щупалець, які разом з мембраною-спідницею вигинаються і стискаються, створюючи тягу. Результати роботи вчені опублікували у журналі Science Robotics.
Що за робот-кальмар?
М'які роботи, створені з повністю м'яких та гнучких матеріалів, давно привертають увагу інженерів через велику кількість ступенів свободи, високого рівня адаптивності та здатності до безпечної взаємодії з навколишнім середовищем. Зазвичай такі роботи рухаються та маніпулюють завдяки безперервній деформації шляхом поступового розтягування, стиснення, вигину або скручування під дією умов навколишнього середовища.
Використання гнучких матеріалів широко вивчається в біологічних рухових установках і підвищення ефективності м’яких роботів пов’язане з синхронізацією вихорів і хвилеподібними деформаціями тіла, використанням течій для руху тощо. Однак, більшість інженерних досліджень спрощують складну механіку тіла, наприклад риб, до однієї гнучкої пластини, а більш повні роботизовані системи, які максимально використовують гнучкість плавників не загострюють увагу на резонансі. Втім, саме використання механічного резонансу вважається найкращим способом підвищити ефективність руху та досягти автономності підводних роботів в обмеженому і складному водному середовищі.
Thierry Bujard
На кого рівнятися з підводного світу?
Різноманітні морські мешканці, такі як медузи, восьминоги, сальпи, молюски та кальмари, використовують періодичний або імпульсний рух для пересування. Це циклічне розширення і стиснення тіла, що дає змогу витісняти рідину та завдяки цьому рухатися. За словами вченим, тварини, що використовують імпульсний рух та широкий діапазон амплітуд деформації, найкраще плавають на короткі дистанції та здатні до стійкого руху. Експерименти показали, що вихрові кільця та зміна розміру, створювана імпульсними струменями, створюють рушійну тягу, що значно перевершує можливості роботів, які використовують, наприклад, постійні струмені води. Роботи не використовують резонанс, покладаючись на пряме спрацьовування або одноразові вибухові струмені.
Навіщо роботу імпульсно-реактивний рух?
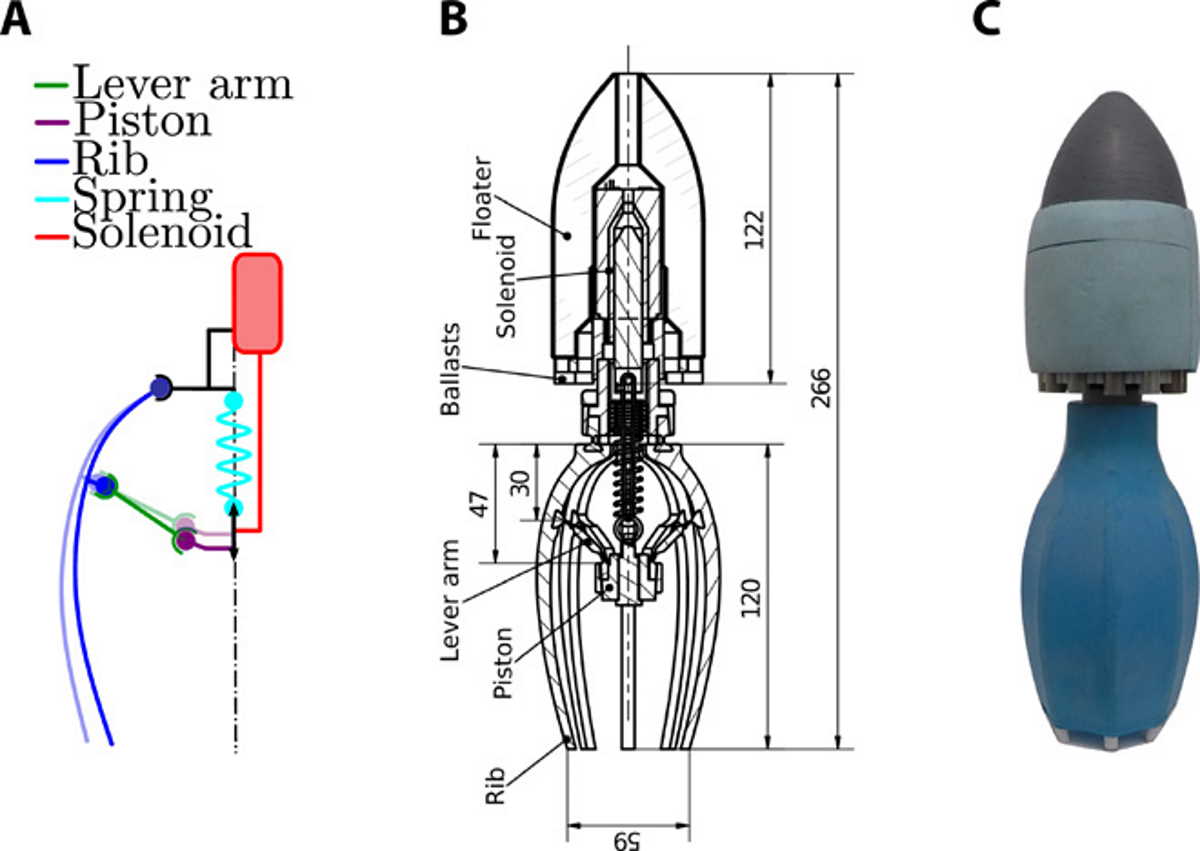
У цій роботі інженери спроєктували робота-кальмара, який складається з гумової мембрани, яка охоплює набір з восьми надрукованих на 3D-принтері гнучких ребер з невеликим поршнем, розташованим у верхній частині тіла робота. Поршень змушує мембрану розширюватися, а потім багаторазово повертатися до своєї первісної форми, створюючи струмені рідини, які просувають робота крізь воду. Це імітує техніку плавання медузи і створює струмені рідини, які переміщують робота по воді. Коли поршень працює з правильною частотою, робот може переміщатися зі швидкістю, яка дорівнює одній довжині тіла в секунду, що відповідає, наприклад, ефективності медузи Aurella aurita. Випробування показують, що новий робот в десять-п'ятдесят разів ефективніший за типових невеликих підводних роботів з пропелерами. За словами вчених, ця підвищена ефективність в поєднанні з додатковими перевагами м'якого і гнучкого зовнішнього вигляду робота, робить його ідеальним для роботи в умовах, близьких до чутливих, таких як коралові рифи або води з великою кількістю фауни