Китайські інженери дещо змінили підхід до того, яким чином можна передати роботу відчуття дотику, та спробували зробити це за допомогою пропріоцепції. Так роботизований м'який палець отримав людське м'язове відчуття, яке визначає положення кінцівок у просторі, та зміг відрізнити пластик від губки з майже стовідсотковим успіхом. Прототип вчені представили на конференції ICCMA 2021, а стаття доступна на сервісі препринтів arXiv.
Cheng et al.
Що таке пропріоцепція?
З-поміж наших п'яти основних органів чуття, які допомагають нам сприймати навколишній світ, тобто зору, слуху, смаку, нюху і дотику, у нас є «шосте» відчуття, породжуване діями нашого власного тіла. Це відчуття положення і руху наших кінцівок, відчуття м'язової сили і зусилля, а також відчуття рівноваги. Від неї залежить те, що ми рівно стоїмо на ногах, і те, наскільки точно ми взаємодіємо зі світом. Існує багато досліджень того, як саме наше тіло здатне це робити. Загалом вчені припускають, що для узгодження, наприклад, положення рук мозок сприймає їх як антагоністів та зчитує різницю сигналів, що від них надходять. Так якщо вона невелика, то руки розташовані одна до одної. Також мозок враховує і відчуття зусилля або тяжкості від наших м'язів. Наше відчуття тяжкості тісно пов'язане із пропріоцепцією — наприклад, щоб порівняти два предмети на вагу, ми їх припіднімаємо догори. Також окрім механорецепторів, які реагують на зовнішні сигнали, мозок навіть реагує на положення суглобів. Наприклад, у людських пальцях такими нейронними агентами будуть м'язи, сухожилля і суглоби, що забезпечують зворотний зв'язок як від їхнього положення, так і від розтягування (деформації).
Як вона може подарувати відчуття дотику?
У біонічних кінцівках розробники все частіше звертаються до м'яких матеріалів у силу їхньої гнучкості, піддатливості та кращої поєднуваності з іншими модулями. Однак все ще головною проблемою роботизованих рук є неможливість отримання адекватної сенсорної інформації. У людини подібні рецептори розподілені по всій поверхні руки на різній глибині, вони чутливі до сигналів різної частоти та разом визначають силу контакту з поверхнею, жорсткість об'єкта та його текстуру, щоб допомогти мозку знайти до нього підхід. Тому і роботизованим рукам варто навчитися імітувати нашу систему сенсорно-моторного зворотного зв'язку. Досі для вимірювання контактної жорсткості пальці роботів оцінювали контактне зусилля і зміщення через кінематичні моделі кінцівок. Для м'яких пальців ситуація ускладнюється саме через важкість побудови такої моделі. Поки м'які маніпулятори послуговуються поверхневими датчиками, що імітує поведінку поверхневих механорецепторів, клітин шкіри, відповідальних за шкірне сприйняття. Але таким сенсорам необхідні точні дотики, бо роботу достатньо з якогось не того боку торкнутися предмета, щоб алгоритми вже не могли зчитати інформацію. А штучна пропріоцепція на думку дослідників, може і зібрати широкий спектр сенсорної інформації, і буде сумісною з м'якими матеріалами, і не вимагати складних механізмів. Роботу буде достатньо подарувати відчуття самого себе, щоб той зі ними міг орієнтуватися у світі різних текстур і поверхонь.
Що зміг помацати робот?
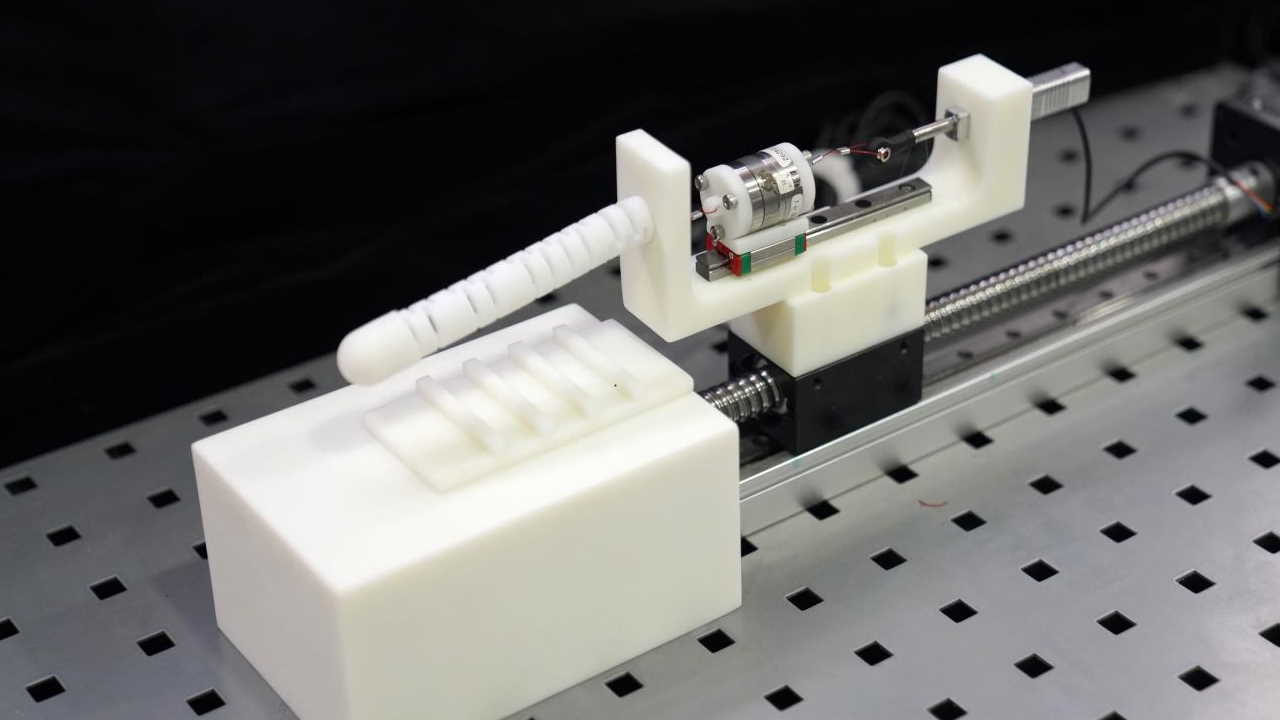
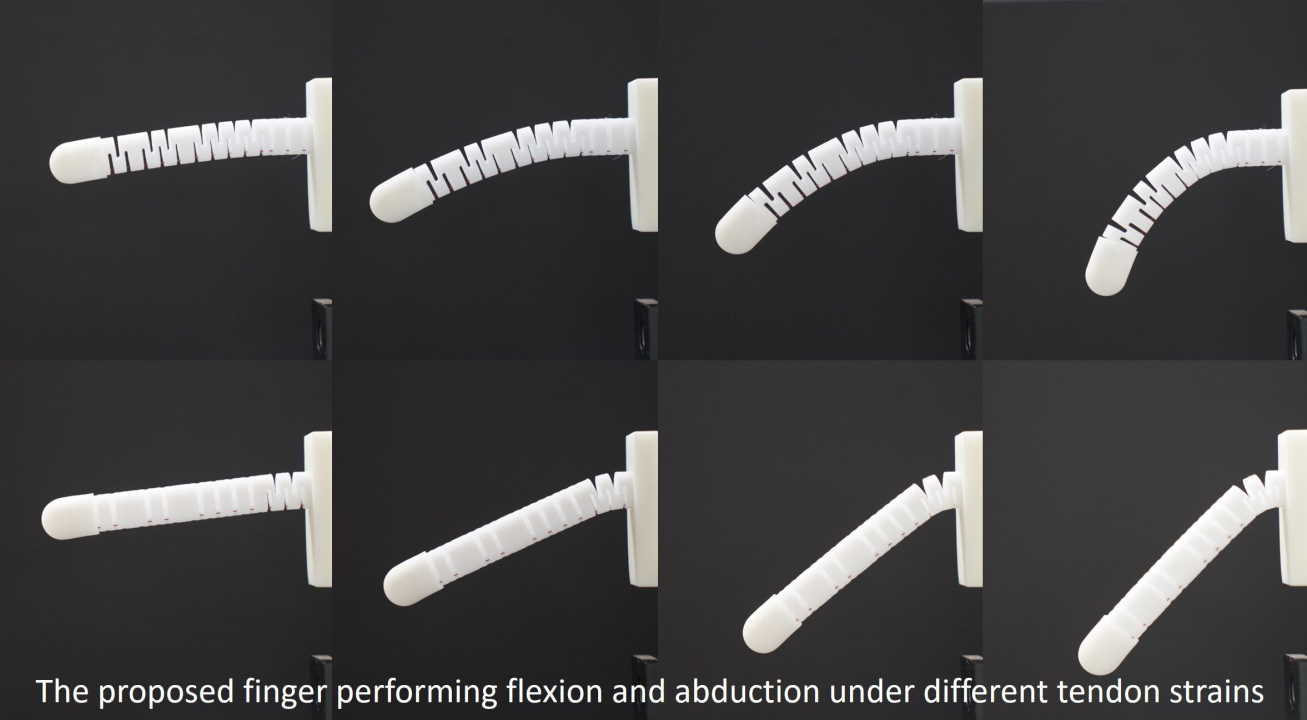
У своїй роботі вчені розробили прототип роботизованого пальця суцільної конструкції з виступами для деформації, що дає змогу згинати й розгинати палець. Прототип зробили з нейлону та сталевого стержня, що приводить у рух конструкцію діаметром у пів сантиметра. Кінчик пальця виготовили з поліуретану, щоб забезпечити більший контакт із поверхнями. В основі механізму лежить датчик зусилля і крутного моменту, які враховують деформації при торканні, інформацію про які затим обробляють алгоритми. Так спершу робота направляють до предметів так, щоб контакт з текстурною пластиною був під кутом 40 градусів, затим він рухається нею зі швидкістю 15 міліметрів на секунду та передає інформацію про розтягнення або стискання сухожиль. Також палець притискає об'єкт на чотири секунди і так передає алгоритмам класифікації величини розкладених компонентів Фур'є на різній частоті від нуля до 30 герців. За ними він і може розрізнити п'ять рівнів жорсткості: пластик PLA, тверду гуму, губку та гумову оболонку. Також йому вдалося розрізнити вісім текстурних пластин: від зовсім гладких до предметів з різними канавками. Загалом успіх робота у розпізнавання склав майже сто відсотків і дещо менше з гумовими поверхнями. Досі робототехніки не зверталися до пропріоцепції як методу тактильного розпізнавання, однак на думку дослідників, їхня робота показує, що навіть за відсутності точного контакту, можливо навчити робота бачити світ на дотик.
Cheng et al.
Раніше ми також писали і про інші не зовсім традиційні способи подарувати роботам відчуття дотику. Наприклад, шотландські інженери замінили сенсори електронної шкіри на сонячні елементи та дали роботизованій руці відчути краї предметів і навіть зібрати для себе енергію. А рідкий метал допоміг п'яти пальцям маніпулятора розрізнити десять поверхонь, погладжуючи їх, що вчені планують застосувати для людських протезів. Більше про відчуття дотику у роботів можна почитати також у нашому матеріалі про роботизовані відчуття «Як роботи дивляться на світ, яке вино їм смакує та чому Ілон Маск знову проти всіх».





