Інженери з Сингапурського університету технологій і дизайну знайшли підхід для виготовлення м'яких роботів за допомогою 3D-принтера. Як прототип вони створили робота-ската, який вимагав набагато менших інженерних зусиль під час виготовлення, та при цьому проплив на 50 відсотків швидше за подібних собі роботів. Метою роботи було знайти підхід, який би полегшив виготовлення м'яких роботів, пояснюють вчені у Advanced Materials Technologies.

Pablo Valdivia y Alvarado Ph.D.
Як створюють м'яких роботів?
Із появою нових підходів до моделювання та механізмів пересування, маніпуляції і приведення в дію, м'яка робототехніка набула стрімкого розвитку. М'які роботи значно легше можуть переживати складні умови завдяки своїй гнучкості та відсутності. Так м'який робот з плавниками поплавав в екстремальному середовищі Маріанського жолоба, а подібний йому робот-черепаха пройшовся пляжем взагалі без електроніки. Однак, для них головну роль у продуктивності і функціональності відіграють саме матеріали. Найчастіше м'яких роботів створюють із композитних конструкцій полімерів, здатних значних пружних деформацій, та деяких компонентів жорсткості, що мають обмежувати гнучкість та нести обчислювальну і силову апаратуру. Тому продуктивність м'якого робота дуже чутлива до складу матеріалу, його розподілу і геометрії елементів (наприклад, розподілу жорсткості при згині на тілі, пальцях, щупальцях, крилах, плавниках).
Але через це підходи до виготовлення м'яких корпусів засновані в першу чергу на методах ручного лиття з обмеженим вибором матеріалів і безліччю етапів виготовлення окремих компонентів. Наприклад, популярний серед робототехніків струменевий 3D-принтер не дає змогу використовувати високов'язкі чорнила або чорнила з якимись частинками, необхідними для нових функціональних якостей робота. А доступні чорнила на основі акрилату, які фотополімеризуються, страждають від низьких максимальних деформацій і швидкого «старіння» під впливом вологості або ультрафіолетового випромінювання.Такий підхід не дає змогу виготовляти композитні конструкції зі складними внутрішніми характеристиками і складною геометрією. У своїй роботі вчені топологічно оптимізували концепцію м'якого робота із плавниками, який надрукували за допомогою технології вбудованого 3D-друку (embedded 3D printing), що заснований на стратегії екструзії (вичавлення) матеріалів. Так вони домоглися виготовлення складних складових елементів в єдиному центрі виробництва, а створений робот виявився кращим плавцем за інших йому подібних.
До чого тут пливучі роботи?
Свій підхід вчені використали для створення підводного м'якого робота, схожого на ската, адже вони зі своїми широкими плавниками є найкращим прикладом підводного пересування, коли зміни кінематики плавників мають вражаючий вплив на маневреність і тягу. Тобто вибір пав на скатів завдяки можливості продемонструвати всі якості робота експериментально: як зміна складу плавників може вплинути на кінематику і, отже, на характеристики пересування.
За допомогою топологічної оптимізації, враховуючи кількість деталей, можливості принтера та можливе навантаження, дослідники створили м'які плавники зі складними внутрішніми характеристиками, що забезпечують точне налаштування їхніх коливань. А для експериментальної оцінки впливу властивостей матеріалу плавників на характеристики пересування робота, їх виготовили три типи: м'який ізотропний плавник, жорстке ребро та композитне ребро, що поєднує матеріали з конструкцією, а також внутрішні компоненти (кожухи, заслінка, батареї), що розмістили між ними перед початком друку.
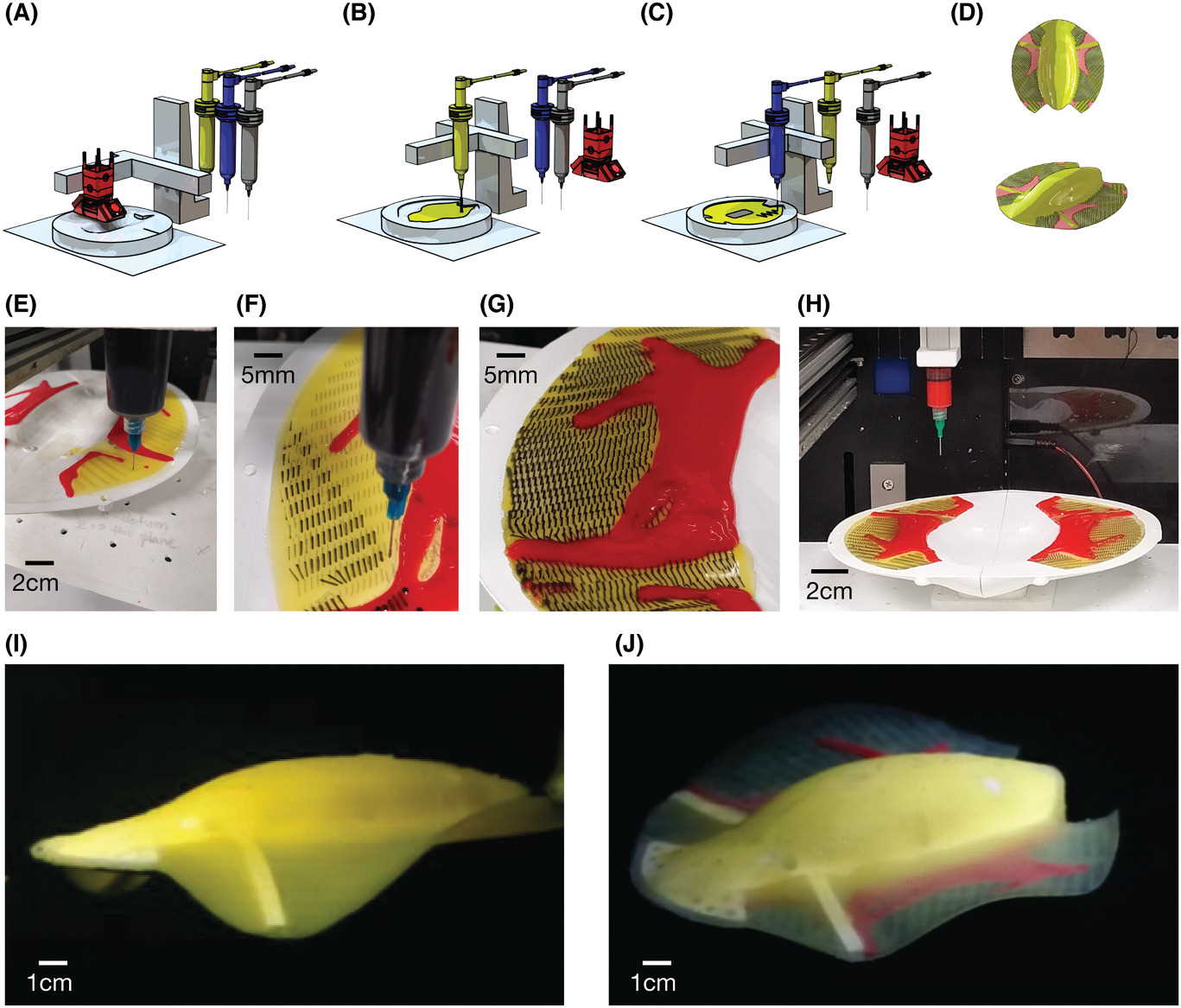
Процес виготовлення робота: у підготовану раніше форму наноситься полімер, всередині якого розмістили виконавчі механізми, датчики, батареї тощо. Принтер наносить різні чорнила та композитні волокна, які потім дозволять роботу вільно користуватися своїми плавниками. Narasimha Boddeti et al. / Advanced Materials Technologies, 2021
Як справився надрукований робот?
Підхід «все в одному» під час створення м'якого робота, натхненого скатами, дав змогу значно поліпшити його плавальні характеристики. Так оптимізований плавець демонструє на 50 відсотків вищу швидкість плавання, на 28 відсотків вищу швидкість повороту і на 55 відсотків менший радіус повороту, ніж неоптимізовані попередні прототипи. Поки він поплавав у воді та помахав плавниками на суші разом із іншими прототипами, яких вчені не оптимізували, однак у майбутньому вчені планують перевірити, як він справиться зі струмом чи течією. Використані силіконові еластомери, які використовуються в цьому прикладі, витримали температури від мінус 50 до 200 градусів Цельсію, а також не боялися ультрафіолету і корозії, на відміну від їхніх аналогів, для затвердіння яких використовують ультрафіолет.
За словами розробників, їхній робот може стати кроком до усунення ручних операцій для виготовлення взагалі, якщо відпаде необхідність змінювати інструменти і повторно заправляти принтер. А якщо роздільна здатність друку зросте від 400 мікронів до сотні, то це покращить остаточну динаміку, оскільки збільшить щільність волокна.





