Інженери з Шанхайського університету розробили систему активного розпізнавання та уникнення перешкод для дронів, надихнувшись совами. Робот вміє крутити головою, не повертаючи тулуб, та прогнозувати траєкторію перешкод і свій рух так, що може навіть впіймати віртуального пацюка. За словами вчених, це перша подібна система, яка працює лише на одній стереокамері. Докладніше про роботу інженерів можна почитати у препринті, опублікованому на arxiv.org.
Заблокований перешкодою дрон двічі обрав інший шлях. Gang Chen et al.
Навіщо дронам мавпувати сов?
Насправді роботів дуже складно навчити взаємодіяти з динамічним середовищем, адже безліч речей просто неможливо передбачити: люди не рухаються, як за сигналом світлофора, дерева у природі не ростуть у шаховому порядку, а птахи не літають виключно по діагоналі. Інженери намагаються захистити і летючих роботів від перешкод, і нас від них різними способами: покращуючи комп’ютерний зір, розвиваючи їм штучний інтелект або просто створюючи додатковий захист. Проте, інженерам спало на думку, що летючим роботам, які матимуть працювати в такому непередбачуваному середовищі, як місто, буде корисно повчитися у тварин, які вміють виявляти та наздоганяти свою ціль. Вчені обрали одного з найкращих летючих мисливців - сову, і спираючись на інформацію про цих пташок, розробили систему активного розпізнавання та уникнення (Active Sense And Avoid system, ASAA). За їхніми словами, це перша система, яка використовує активний стереозір, причому для виявлення та уникнення перешкод дрону потрібна всього одна камера, замість використання безлічі датчиків, що робить технологію простою і дешевою.
Чому обрали саме сов?
Чим більше компонентів у системи, тим складнішим і дорожчим стає виробництво. І зазвичай з цим стикається техніка, якій потрібно вміти бачити та аналізувати побачене навколо. Тому інженерам потрібно було якомога спростити зорову систему свого дрона і сови виявилися відмінною підказкою - їм не потрібно рухати очима, гнучка шия забезпечує огляд на 270 градусів та дає змогу швидко реагувати на подразники навіть не повертаючи тіло.
Як інженерам вдалося відтворити совині здібності?
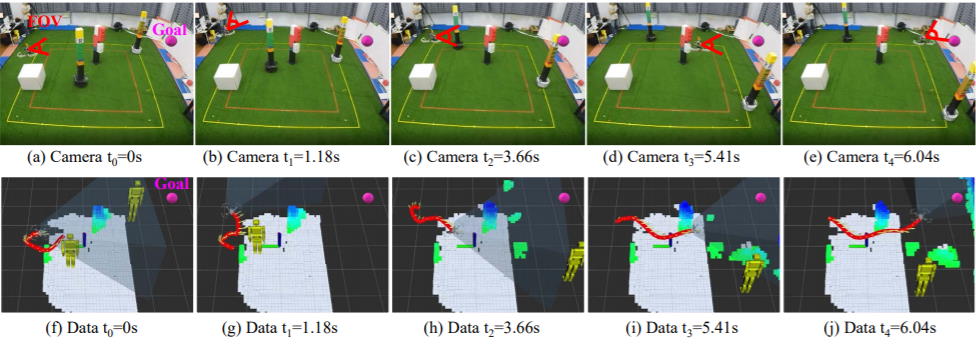
Щоб відтворити те, як сови рухають очима в різних напрямках і виявляють як статичні, так і рухомі об'єкти навколо них, дослідники встановили серводвигун і стереокамерами на квадрокоптер. Камера виконує роль голови, а серводвигун - надрухомої шиї. Завдяки невеликій вазі, стереокамера може рухатися набагато швидше, ніж тіло робота, і її рух практично не впливає на політ дрона. Система використовує алгоритм планування датчиків, щоб оцінити, за якою стороною дрону краще спостерігати, і планує кут, на який його «голова» має повернутися. Таким чином, квадрокоптер постійно відчуває навколишнє середовище, швидко виявляючи перешкоди на шляху. Крім того, система відстежує і прогнозує траєкторії рухомих перепон та адаптує свої рухи до змін. На основі даних, зібраних стереокамерою, система також може планувати траєкторію польоту для дрона, змальовуючи в загальних рисах найбільш зручну для безпечного досягнення мети.
Інженери оцінили свою систему в серії експериментів, де квадрокоптер мав досягти бажаного місця, уникаючи всіх перешкод. На цьому вчені не зупинилися і змусили робота відслідкувати та ловити штучного щура. Результати виявилися багатонадійними, оскільки робот добре впорався з обома завданнями - швидко адаптувався до різких змін і уникав зіткнень як зі статичними, так і з рухомими перешкодами. До речі, сови взагалі є улюбленцями авіаінженерів - читайте про це докладніше у нашому матеріалі про стосунки тварин і літаків “Панцир, жабри, два крила. Навіщо авіаінженери спостерігають за жуками, совами й окунями”.





